建設現場DXのARAV株式会社(東京都文京区)は、遠隔システム開発を手掛ける合同会社ビスペル(静岡県富士市)と共同で、油圧ショベル作業の自動化システムを開発、事業化を開始した発表した。このシステムを使うことで、油圧ショベルが掘削からダンプトラックなどへの積み込みを自律的に行うことができる。ARAVは2021年中にこのシステムの建設現場への実証導入を目指す。
メーカー問わず後付け可能 21年中の現場導入目指す
ARAVは東京大学発の建設現場のDX・自動化支援を手掛けるスタートアップ。昨年6月にはビスペルと共同で油圧ショベルのインターネットを経由したリアルタイムの遠隔操作に成功している。今回開発したシステムでは、油圧ショベルが掘削からダンプトラックへの積み込みまで一連の作業を自律的に行うことができる。システムはメーカー、機種を問わずいずれにも対応する。既存の建機に後付けが可能だ。
事業化にあたり行った実証実験では、自動運転機能を搭載した無人油圧ショベルが、有人操作の油圧ショベルから受け取った残土を、有人操作のダンプトラックに自律的に繰り返し載せることができることを確認した。
この実証事業は内閣府と準天頂衛星システムの運用等事業を行う準天頂衛星システムサービス株式会社(東京都府中市)の「2020年度みちびきを利用した実証事業」に採択された事業で 準天頂衛星みちびきのセンチメータ級測位補強サービスを活用し評価試験を実施した。
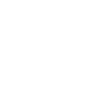
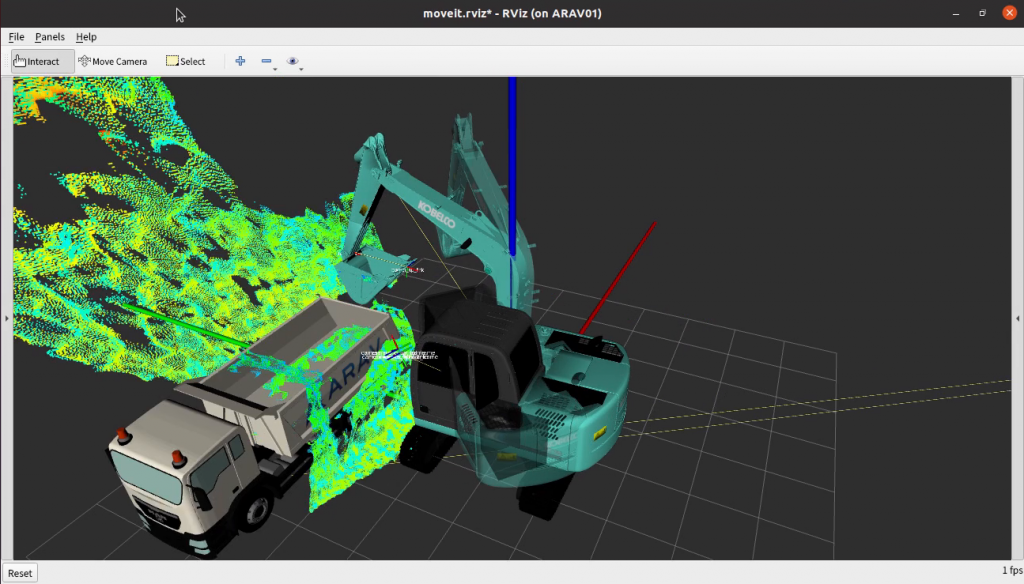
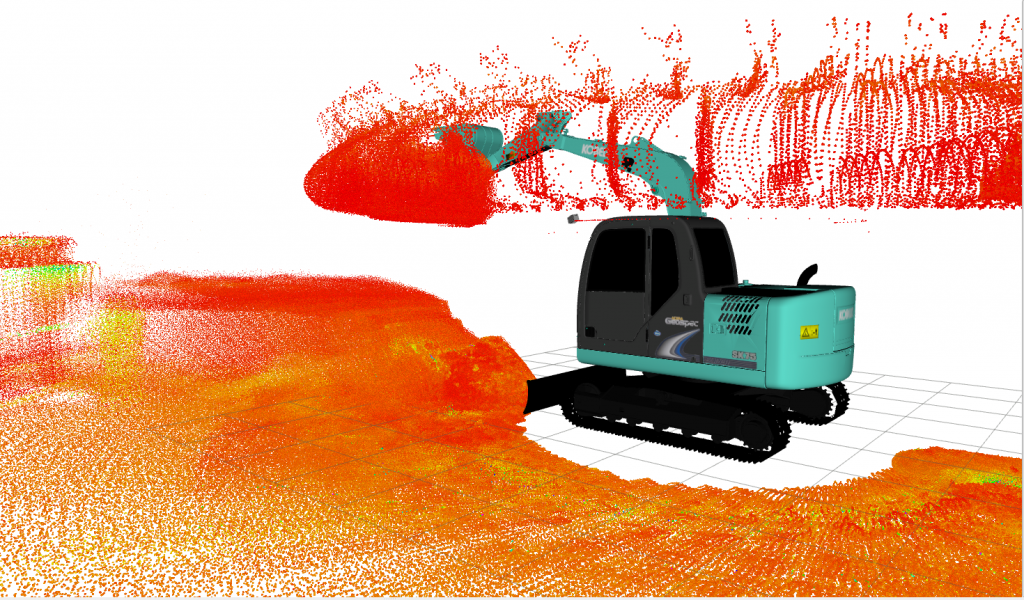
油圧ショベルによる自律的な掘削・積み込みは、「建機・周辺環境の状態認識」と「掘削・積み込み動作の生成と実行」を繰り返すことで可能になっている。「建機・周辺環境の状態認識」は、姿勢センサやGNSS, 3D LiDARなど複数のセンサで、有人操作のダンプトラックの動作も含めて状況を観測し、ARAVの技術で統合することで実現させた。また「掘削・積み込み動作の生成と実行」にはARAVのモーションプランニング技術で、掘削すべきポイントから積み込みポイントへの動きを自律的に計算して動作が生成・実行されるという。
ARAVは、2021年中に本システムの建設現場への実証導入を目指す。特に繰り返し動作が過酷な残土積み込みタスクを対象に自動積み込み油圧ショベルのサービス展開を図る方針だ。同社はこのシステムが、より少ない人数で今までの作業を行うことを可能にすることを通じ、安全確保やオペレーター不足などの課題解消に貢献したいと意気込む。あわせて建設機械の自動化・遠隔化の共同実証実験パートナーを募集している。
AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。









 SkyDrive、東京で初のデモフライト 飛行中のヘリと音量差が歴然
SkyDrive、東京で初のデモフライト 飛行中のヘリと音量差が歴然  新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築
新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築  NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」
NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」  「JUIDA新年の集い」東京會舘で開催 総選挙公示日と重なり政治家の姿なし
「JUIDA新年の集い」東京會舘で開催 総選挙公示日と重なり政治家の姿なし  SkyDrive福澤代表、特派員協会の会見でコンパクトの優位性アピール 日本製へのこだわりも説明
SkyDrive福澤代表、特派員協会の会見でコンパクトの優位性アピール 日本製へのこだわりも説明  エアロジーラボのG4-S、往復72㎞を無給油で飛行 九州整備局が南海トラフ対策の実験
エアロジーラボのG4-S、往復72㎞を無給油で飛行 九州整備局が南海トラフ対策の実験  ブルーがドーム屋根の漏水箇所特定にドローン活用 ELIOS3が内装側を飛行、外装はMatrice 3TD
ブルーがドーム屋根の漏水箇所特定にドローン活用 ELIOS3が内装側を飛行、外装はMatrice 3TD  音楽とドローンの2026年への期待 2025年には「RED LINE」や「ジ・エンプティ」話題
音楽とドローンの2026年への期待 2025年には「RED LINE」や「ジ・エンプティ」話題