- 2019.11.15

公益財団法人総合研究奨励会・日本無人機運航管理コンソーシアム(JUTM)は11月14日、福島ロボットテストフィールドで、ドローンを活用した警備の実験を行った。用途別のガイドライン作成が目的で、この日は警備のための運用を想定し、イームズロボティクス株式会社、綜合警備保障株式会社(ALSOK)も参加した。また実験にはイームズロボティクスの「UAV-E6106FL」を使った。
効率的な警備の要件を洗い出し ガイドラインを策定

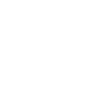
巡回するドローンの様子を警備本部でモニター この日は、福島ロボットテストフィールド内の、住宅、ビル、交差点などを再現した「市街地フィールド」と呼ばれる一角でドローンを飛ばして巡回警備を実施。警備の現場から100メートルほど離れた場所に警備本部を設け、ドローンの挙動のモニタリングや操縦者との連絡の可否、ドローンから送られてくる映像から異常の有無などを確認した。
ドローンはボタン操作ひとつで自動離陸。あらかじめプログラムされた通り飛行。市街地フィールドを高度15メートルほどで高さを維持し、ビルのエリアでは自動で高度をあげた。住宅やビルの場所では、建物をまわりこんで監視、ドローンのカメラがとらえた映像は、リアルタイムで警備本部に伝送され、室内のモニターに映し出された。本部では、ドローンの挙動確認の役割を担う担当者と、映し出された映像から異常を見つける役割を担う担当者の2人1組体制で対応。ドローンが警備をしている「市街地フィールド」にいるパイロットと連絡を取り合った。
ドローンのカメラがものかげに隠れていた不審者役を見つけた様子がモニターに映しだされると、警備本部で待機していた異常検知担当者が「不審者を発見。警察に連絡」とパイロットに連絡。パイロットはドローンの捜査を手動に切り替えて不審者をカメラでとらえて行方を追い、警察官役がかけつけるまでの様子を確認した。事態が収束すると、ドローンは自動航行に戻り警備コースを巡回し、作業後に離着陸地点に戻った。一連の実験の様子は、JUTMの鈴木真二代表も見守った。
この日の実験は、ドローン操縦について一定の技能を持ち、これから警備事業に参入しようとする事業者が主な対象。少子化を背景に、省人化させながら、有効で効率的な警備を実現させるために必要な要件を洗い出すことが今回の実験の目的で、得られた知見を整理したうえで、ガイドラインにまとめる。ガイドライン作成は公益財団法人福島イノベーション・コースト構想推進機構の委託事業で、前日の11月13日にも、一般社団法人日本UAS産業振興協議会(JUIDA)が、空撮や緊急医療輸送の領域でガイドラインをまとめるための実験を実施した。
実験会場となった福島ロボットテストフィールド所長も務める鈴木真二代表は「福島ロボットテストフィールドには、災害現場を模擬したフィールド、実験設備も整い、陸海空のロボットの研究開発、実証実験がいっしょにできます。陸海空がすべてできるのは世界にも例がないの整った設備です」と活発な利用を促した。

巡回警備のため離陸したイームズ・ロボティクスの「UAV-E6106FL」 
福島ロボットテストフィールドの「市街地フィールド」上空を巡回警備 
福島ロボットテストフィールドには実験のために市街地を再現した「市街地フィールド」がある。JUTMの警備実験では、ここでドローンが巡回した 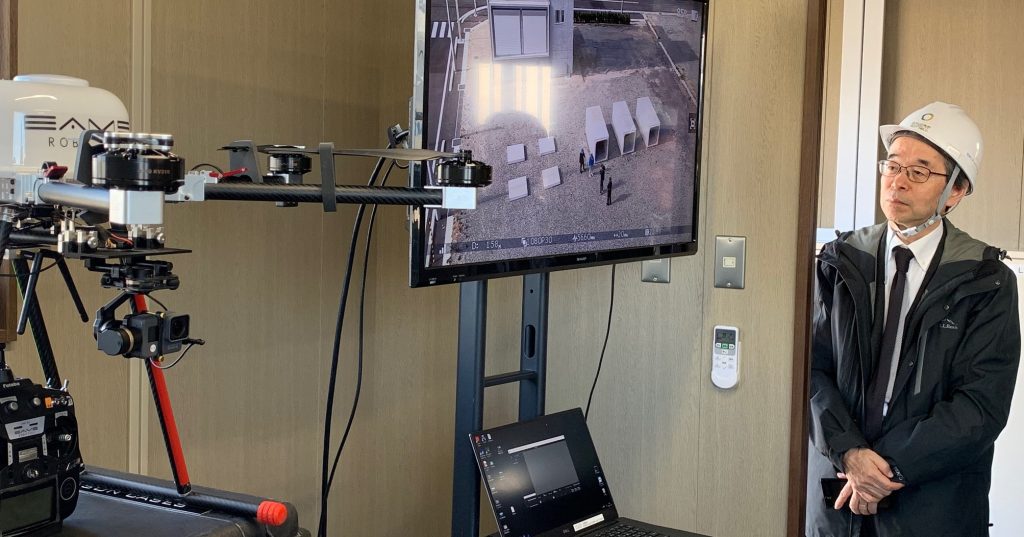
実験の様子を見守るJUTMの鈴木真二代表 
警備本部では2人体制で対応。モニター画面から不審者を確認すると監視役の担当者が通報する 
当日の実験内容 AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -












 モータ、フライトコントローラ、バッテリなどで強い危機感 政府、国内のドローン供給網強化へ パブコメ募集中
モータ、フライトコントローラ、バッテリなどで強い危機感 政府、国内のドローン供給網強化へ パブコメ募集中  SkyDrive、東京で初のデモフライト 飛行中のヘリと音量差が歴然
SkyDrive、東京で初のデモフライト 飛行中のヘリと音量差が歴然  新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築
新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築  NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」
NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」  「JUIDA新年の集い」東京會舘で開催 総選挙公示日と重なり政治家の姿なし
「JUIDA新年の集い」東京會舘で開催 総選挙公示日と重なり政治家の姿なし  SkyDrive福澤代表、特派員協会の会見でコンパクトの優位性アピール 日本製へのこだわりも説明
SkyDrive福澤代表、特派員協会の会見でコンパクトの優位性アピール 日本製へのこだわりも説明  エアロジーラボのG4-S、往復72㎞を無給油で飛行 九州整備局が南海トラフ対策の実験
エアロジーラボのG4-S、往復72㎞を無給油で飛行 九州整備局が南海トラフ対策の実験  ブルーがドーム屋根の漏水箇所特定にドローン活用 ELIOS3が内装側を飛行、外装はMatrice 3TD
ブルーがドーム屋根の漏水箇所特定にドローン活用 ELIOS3が内装側を飛行、外装はMatrice 3TD  音楽とドローンの2026年への期待 2025年には「RED LINE」や「ジ・エンプティ」話題
音楽とドローンの2026年への期待 2025年には「RED LINE」や「ジ・エンプティ」話題