- 2019.11.15
JUTMが福島ロボットテストフィールドで警備実験 イームズの6発機が「市街地フィールド」巡回し“不審者”発見

公益財団法人総合研究奨励会・日本無人機運航管理コンソーシアム(JUTM)は11月14日、福島ロボットテストフィールドで、ドローンを活用した警備の実験を行った。用途別のガイドライン作成が目的で、この日は警備のための運用を想定し、イームズロボティクス株式会社、綜合警備保障株式会社(ALSOK)も参加した。また実験にはイームズロボティクスの「UAV-E6106FL」を使った。
効率的な警備の要件を洗い出し ガイドラインを策定

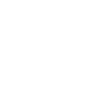
巡回するドローンの様子を警備本部でモニター この日は、福島ロボットテストフィールド内の、住宅、ビル、交差点などを再現した「市街地フィールド」と呼ばれる一角でドローンを飛ばして巡回警備を実施。警備の現場から100メートルほど離れた場所に警備本部を設け、ドローンの挙動のモニタリングや操縦者との連絡の可否、ドローンから送られてくる映像から異常の有無などを確認した。
ドローンはボタン操作ひとつで自動離陸。あらかじめプログラムされた通り飛行。市街地フィールドを高度15メートルほどで高さを維持し、ビルのエリアでは自動で高度をあげた。住宅やビルの場所では、建物をまわりこんで監視、ドローンのカメラがとらえた映像は、リアルタイムで警備本部に伝送され、室内のモニターに映し出された。本部では、ドローンの挙動確認の役割を担う担当者と、映し出された映像から異常を見つける役割を担う担当者の2人1組体制で対応。ドローンが警備をしている「市街地フィールド」にいるパイロットと連絡を取り合った。
ドローンのカメラがものかげに隠れていた不審者役を見つけた様子がモニターに映しだされると、警備本部で待機していた異常検知担当者が「不審者を発見。警察に連絡」とパイロットに連絡。パイロットはドローンの捜査を手動に切り替えて不審者をカメラでとらえて行方を追い、警察官役がかけつけるまでの様子を確認した。事態が収束すると、ドローンは自動航行に戻り警備コースを巡回し、作業後に離着陸地点に戻った。一連の実験の様子は、JUTMの鈴木真二代表も見守った。
この日の実験は、ドローン操縦について一定の技能を持ち、これから警備事業に参入しようとする事業者が主な対象。少子化を背景に、省人化させながら、有効で効率的な警備を実現させるために必要な要件を洗い出すことが今回の実験の目的で、得られた知見を整理したうえで、ガイドラインにまとめる。ガイドライン作成は公益財団法人福島イノベーション・コースト構想推進機構の委託事業で、前日の11月13日にも、一般社団法人日本UAS産業振興協議会(JUIDA)が、空撮や緊急医療輸送の領域でガイドラインをまとめるための実験を実施した。
実験会場となった福島ロボットテストフィールド所長も務める鈴木真二代表は「福島ロボットテストフィールドには、災害現場を模擬したフィールド、実験設備も整い、陸海空のロボットの研究開発、実証実験がいっしょにできます。陸海空がすべてできるのは世界にも例がないの整った設備です」と活発な利用を促した。

巡回警備のため離陸したイームズ・ロボティクスの「UAV-E6106FL」 
福島ロボットテストフィールドの「市街地フィールド」上空を巡回警備 
福島ロボットテストフィールドには実験のために市街地を再現した「市街地フィールド」がある。JUTMの警備実験では、ここでドローンが巡回した 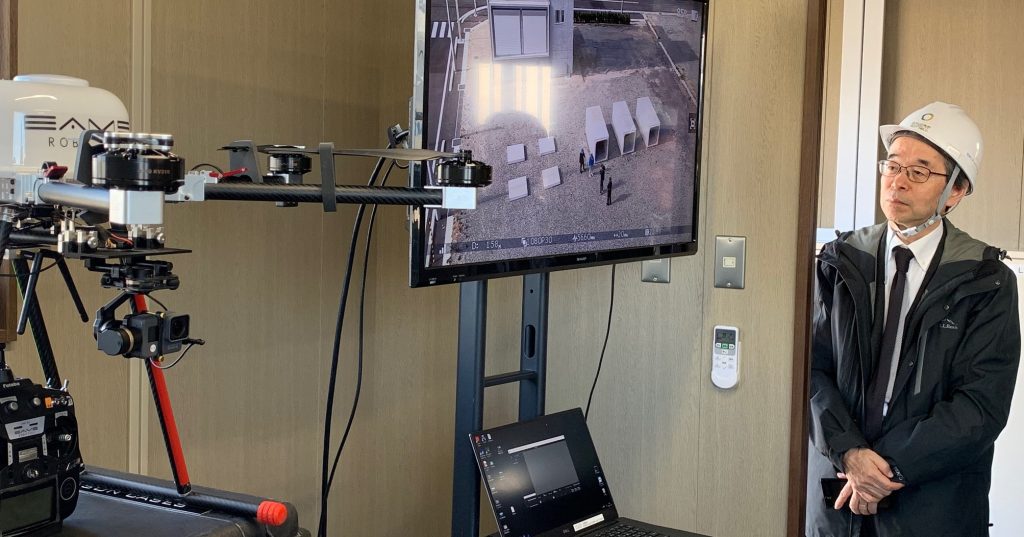
実験の様子を見守るJUTMの鈴木真二代表 
警備本部では2人体制で対応。モニター画面から不審者を確認すると監視役の担当者が通報する 
当日の実験内容 AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -












 ベイスターズ、みなとみらいで3500機のショーを7/26に無料開催 運営はレッドクリフ
ベイスターズ、みなとみらいで3500機のショーを7/26に無料開催 運営はレッドクリフ  カープも本拠地でドローン演出 「ハローキティ&シナモロール ライブ&ドローンパフォーマンス」開催へ
カープも本拠地でドローン演出 「ハローキティ&シナモロール ライブ&ドローンパフォーマンス」開催へ  【JapanDrone2026】ゼンムテックが撮影データの無意味化技術「ZENMU-AONT」公開
【JapanDrone2026】ゼンムテックが撮影データの無意味化技術「ZENMU-AONT」公開  【JapanDrone2026】オートノミーダイナミクスが独自FC搭載の試作機Guardian Zero Ver.1を公開
【JapanDrone2026】オートノミーダイナミクスが独自FC搭載の試作機Guardian Zero Ver.1を公開  Prodorone、JIC系ファンド引受先に第三者割当 双方が発表
Prodorone、JIC系ファンド引受先に第三者割当 双方が発表  「おジャ魔女どれみ」のドローンショー7月開催 ドローンショー・ジャパン、東映デジマが主催
「おジャ魔女どれみ」のドローンショー7月開催 ドローンショー・ジャパン、東映デジマが主催  【JapanDrone2026】来場者は2万人超 各賞も決定
【JapanDrone2026】来場者は2万人超 各賞も決定  SkyDrive、チャーター運航のジェイビズと提携 日本国内の運航体制構築へ
SkyDrive、チャーター運航のジェイビズと提携 日本国内の運航体制構築へ  米Sky Elementsが400機でW杯の結果表示 Visit Seattleの企画「ドローン・スコアボード」
米Sky Elementsが400機でW杯の結果表示 Visit Seattleの企画「ドローン・スコアボード」  石川エナジーとマゼックスが提携 高精度調査技術と重量運搬の統合目指す
石川エナジーとマゼックスが提携 高精度調査技術と重量運搬の統合目指す





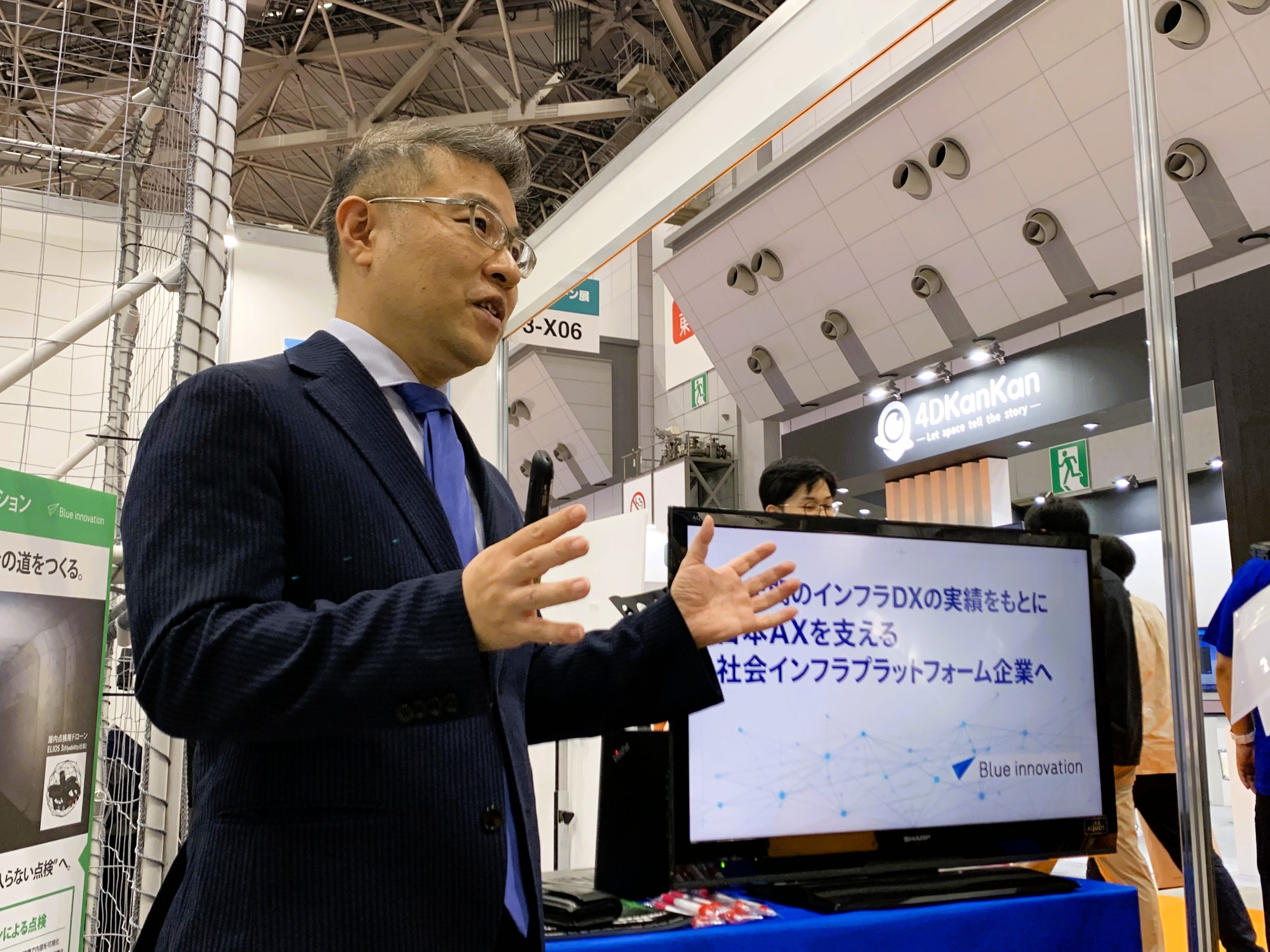
ブルーイノベーション株式会社(東京)の熊田貴之社長は7月15日、東京・ビックサイトで開幕した展示会「国際ドローン展」に出展した自社ブースで今後の方針に関して報道陣に説明した。この中で政府のバーティカルAI強化方針を踏まえ、ブルーイノベーションが開発した複数デバイスの遠隔制御テクノロジー、BEP(Blue Earth Platform)のAI連携を本格化させ、それらも活用しながらアジアの国・地域を中心に海外との連携を強化させることなどを表明した。熊田代表は「将来的には日本と海外の事業規模が同じぐらいになるようなことを想定している」と話した。また、今後、具体的な取り組みについて公表していくと予告した。
事業規模、将来的に「日本と海外、同じぐらいに」
熊田社長は説明の中で政府の人工知能戦略本部が7月10日にAI基本計画の改定案を決定したことや、会合に出席した高市早苗首相が、特定の業界や業務特化型の「バーティカルAI」の開発と実装を推進する方針を表明したことに触れ、ブルーイノベーションもその方針と歩調を一致させ、BEPとAIの連携を強化させると表明した。
BEPは、ロボットやドローンなど複数の自律稼働デバイスを遠隔制御し、クラウドで情報を収集、管理する技術で、そこに用いるセンサーモジュールの開発も含めてBEPと呼んでいる。主に、下水道やプラント点検、巡回点検や監視、送電線点検、地域の防災システムなどに向けたソリューションにBEPを活用していて、熊田代表は「政府が表明したバーティカルAIの業界、用途特化型AIの考え方と、私たちの取り組みはシンクロしていると考えています」と分析。開発が加速しているAIのベンダーと連携しながらBEPのAI連携を加速させる。
とくに、ブルーイノベーションにはすでに15年間の現場経験でデータを蓄積していることから、熊田代表は「15年の現場データとBEPを基板に、これらを掛け合わせて日本のAIトランスフォーメーションを支える社会インフラプラットフォーム企業へ進化することを目指し、バーティカルAIに取り組みます」と述べた。
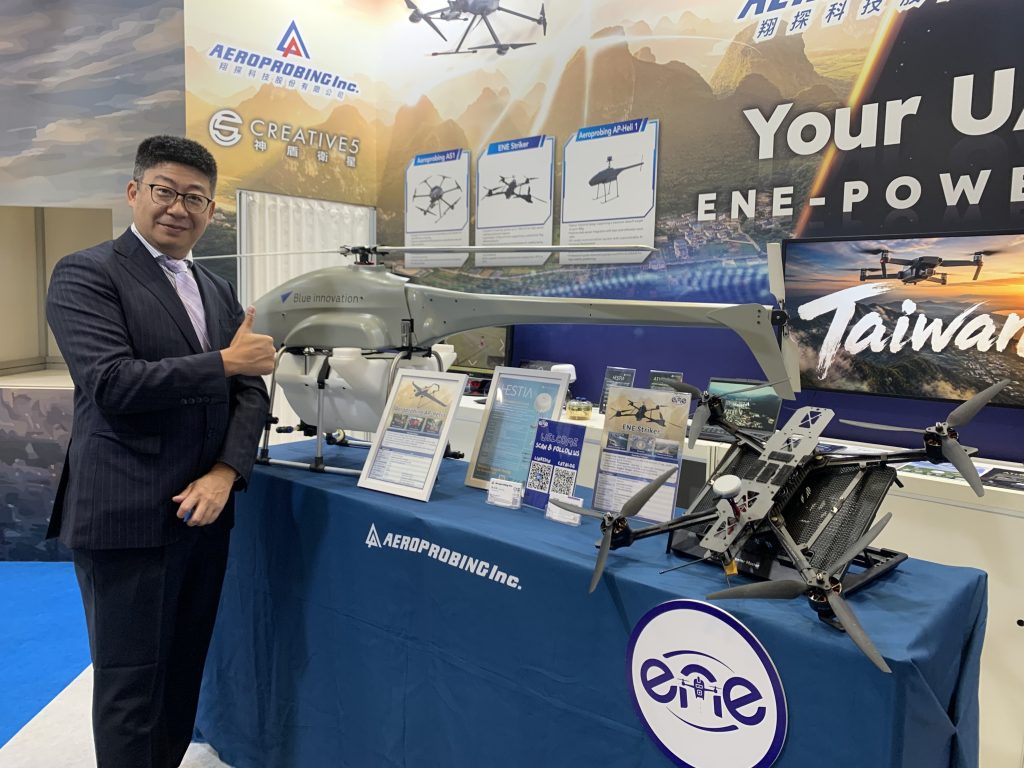
また今後、アジアを中心とした海外事業の展開にも力を入れる。ブルーイノベーションは台湾、Aeroprobing社とドローンソリューションとMOUを締結し、今年(2026年)6月の展示会「JapanDrone2026」では、同社の点検機「AS1」と農業機「AP-Heli」をブルーイノベーションのブランドで展開するなどの具体策も公表するなど連携を進めている。今後はアジアを中心に、BEPも含めてアジア地域での連携などの展開を強化することを表明。展開する事業については「日本で提供していないドメインを含む可能性もある」と述べた。同社の事業の展望については、「将来的には、日本と海外の事業が同じぐらいになることを目指す」と話した。
さらに、こうした戦略に基づき、今後、連携の進捗次第で、プレスリリースなどを通じてて公表していく方針も予告した。

AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。株式会社石川エナジーリサーチ(太田市<群馬県>)と、株式会社マゼックス(東大阪市<大阪府>)は、このたび業務提携契約を締結したと発表した。発表日は7月16日。石川エナジーの高精度な調査や点検の技術と、マゼックスの重量物運搬の技術を統合し、現場に生かすことを目指す。発表は以下の通り。
国産産業用ドローンの活用拡大にむけた業務提携のおしらせ ~「調査 × 運搬」の統合ソリューションで、過酷な産業現場の省力化・安全性向上に貢献
2026年7月16日
株式会社石川エナジーリサーチ
株式会社マゼックス
国産産業用ドローンメーカーである株式会社石川エナジーリサーチ(本社:群馬県太田市、代表者:石川 満、以下「石川エナジーリサーチ」)と、農林業用ドローンで豊富な実績を持つ株式会社マゼックス(本社:大阪府東大阪市、代表者:吉野 弘晃、以下「マゼックス」)は、このたび業務提携契約を締結いたしました。
【業務提携の概要と目的】
林業、建設・土木、防災などの産業現場では、深刻な人手不足と高齢化が進行しており、急傾斜地や危険地帯における作業の省力化・無人化が日本国内全体の急務となっています。
石川エナジーリサーチの「高精度な調査・点検能力」とマゼックスの「重量物運搬能力」という両社のドローン技術を統合し、実践的な現場支援ソリューションを提供します
【両社の強みと背景】
石川エナジーリサーチは、自動車メーカー出身の技術者が設立した、自社一貫体制と国産にこだわる産業用ドローンメーカーです。高性能機「ビルドフライヤーchrome」は最大20m/sの耐風・防水性を備え、4.4kg積載で約25分(無積載40分)飛行します。赤外線カメラやLTE等の拡張性と、数センチ精度のRTK測位や360°障害物センサーにより、過酷な現場でも安全確実な運用を実現します。 一方マゼックスは、住友林業との実証を経て国内初の林業用機「森飛」を開発したトップクラスの実績のあるメーカーです。現在は最大55kg・25kg積載の多用途機「軽助55」「軽助25」を展開し、平地用機体では困難な山林環境において、苗木や建設部材など重量資材の運搬を省力化し、多様な現場ニーズに応え続けています。
【本協業による社会への貢献】
本協業は、社会課題の解決にも大きく貢献します。山間部や急傾斜地での状況確認から資材搬入までをドローンで代替することで、作業員の危険地帯への立ち入りを最小限に抑え、労働災害リスクの低減と安全な労働環境の創出を実現します。
また、従来は人手と時間を要していた作業道や法面の点検、苗木・建設部材の運搬をドローンで効率化し、一次産業や建設業において深刻化する労働力不足の解消に直接的に寄与します。
さらに、災害発生時においては、当社機体による被災状況の迅速な把握・記録と、マゼックス機体による緊急物資の投下・輸送をシームレスに連携させることで、地域の防災力と復旧スピードの向上を図り、災害時の迅速なレジリエンス強化を推進します。
【各社代表コメント】
株式会社石川エナジーリサーチ 代表取締役 石川 満
「当社が長年培ってきた「国産の機体開発・製造技術」と、マゼックス社が有する「現場提案力・運用知見」を高い次元で掛け合わせることで、これまで以上に実用性と信頼性の高いソリューションを提供できると確信しております。当社の強みである高い飛行性能や柔軟なカスタマイズ性を最大限に活かし、多様な産業現場が直面する課題解決に向けて、共に強力に取り組んでまいります。」
株式会社マゼックス 代表取締役 吉野 弘晃
「当社はこれまで、農業・林業分野の現場課題に向き合いながら、国産ドローンの活用可能性を追求してまいりました。今回の提携により、運搬だけでなく調査・点検まで含めた総合的な現場支援の提案を強化し、より多くの産業現場に貢献してまいります。」

AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。- 2026.7.10
AAM開発の株式会社SkyDrive(豊田市<愛知県>)とプライベートジェットやヘリコプターのチャーター運航事業を手掛ける株式会社Japan Biz Aviation(ジェイビズ、JBZ、東京)は7月9日、両者が業務提携したと発表した。日本国内での商業運航に向けた体制の構築などを進め、普及促進を図る狙いがある。
「プレオーダー、航空運送事業許可を持たない事業者が中心」の日本事情に対応
SkyDriveとJapan Biz Aviationの提携は、航空運送事業許可(air operator’s certificate、AOC)を持たない事業者が多くAAMへの期待を寄せている日本国内での普及促進を図る狙いがある。SkyDriveの機体のプレオーダーは、海外からはヘリコプター運航会社など航空運送事業許可を持つ事業者を中心に寄せられているが、日本国内では鉄道事業者などが中心だ。このため両社はAAMの日本国内の普及のため、航空運送事業許可を持たない事業者の期待に応えられる環境を整える準備を進める。
AOCは利用者から航空機を使い、対価を受け取って事業を行うために必要となる事業許可で、安全運行のために必要な人員、資機材、資産、システムなどが厳密に審査される。無許可の自家用機で有償事業を行った場合には懲役や罰金が科されることが決められている。SkyDriveの生産するAAMは航空機にあたり、事業に活用する場合にはAOCが必要になるが、現時点でプレオーダーを入れている事業者が、日本ではAOCを持たない事業者であることが多く、今後もAOCを持たない事業者が関心を寄せることが考えられることから、事業の構築スキームをあらかじめ準備することにより、円滑な普及につながる道筋を構築する。SkyDriveの発表とジェイビズの発表はこちら。
以下はSkyDriveの発表(Japan Biz Aviationの発表はそのあとに)
HondaJet(ホンダジェット)や Bell(ベル)へリコプターのチャーター運航等を展開する Japan Biz Aviation と「空飛ぶクルマ」の国内商業運航に向けた業務提携の基本合意書を締結
~既存の航空運送事業者の知見を活かし、国内における運航体制の構築を加速~
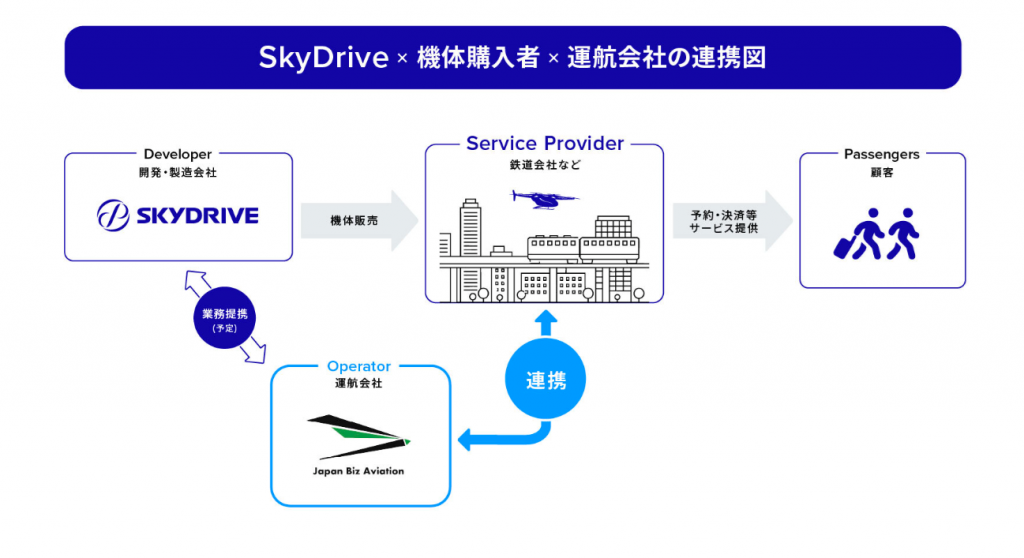

コンパクトな「空飛ぶクルマ」の開発・製造・販売を行う株式会社 SkyDrive(本社:愛知県豊田市、代表取締役 CEO 福澤知浩、以下「SkyDrive」)は、HondaJet(ホンダジェット)や Bell(ベル)へリコプター等のビジネスジェットやヘリコプターのチャーター運航等を展開する株式会社 Japan Biz Aviation(本社:東京都大田区、代表取締役 小泉 愼・冨永 政幸、以下「JBZ」)と、日本国内における「空飛ぶクルマ」の商業運航に向けた業務提携に関する基本合意書を締結したことをお知らせいたします。
■ 背景と目的
SkyDrive は現在、国内外から累計 427 機のオーダー(プレオーダー:354 機、機体購入基本合意:73 機)をいただいております。海外市場においては、ヘリコプター運航会社やチャーター機運航会社など、既に自社で航空運送事業許可(以下、「AOC」)を保有する企業によるオーダーが中心となっています。一方で、日本国内においては、鉄道会社などAOC を保有しない企業からのオーダーが多いという特徴があります。今後、空飛ぶクルマのサービス普及と市場拡大を実現させるため、豊富な運航・整備実績を持つパートナー企業と連携することで、安全かつ円滑な事業開始を目指します。その第一弾として、ビジネス航空分野で高い専門性を有する JBZ と、具体的な協議を進めることに合意いたしました。
■ 本基本合意書の内容
本合意に基づき、両社は以下の事項について継続的な協議を行ってまいります。
⚫ スキームの構築:SkyDrive、JBZ および機体購入者の役割分担の策定。
⚫ ロードマップの策定:運航開始時期および将来的な計画の立案。
■ 今後の展望
SkyDrive は、JBZ および今後予定している他のパートナー企業との連携を通じて、安心して機体を購入頂ける体制を構築してまいります。これにより、業界を問わずどの企業でも空飛ぶクルマを活用した事業展開を可能にし、国内における「空飛ぶクルマ」の社会実装を加速させてまいります。
■ 各社コメント
株式会社 SkyDrive 代表取締役 CEO 福澤 知浩
この度、ビジネス航空のスペシャリストである JBZ 様と基本合意書 を締結できたことを大変嬉しく思います。日本国内で空飛ぶクルマを普及させるためには、多様な企業が参入できる環境作りが重要と考えております。JBZ 様と共に、安全で信頼性の高い運航体制を構築し、新しい空の移動体験をいち早く届けてまいります。
株式会社 Japan Biz Aviation 代表取締役 小泉 愼
この度、SkyDrive 様と「空飛ぶクルマ」の国内商業運航に向けた業務提携に関する基本合意書を締結できましたことを、誠に光栄に存じます。当社はこれまで、富裕層をはじめとする航空機オーナーの皆様のご意向に寄り添いながら、HondaJet および Bell429 等の運航を通じて、安全を最優先とした高付加価値な移動サービスの提供に取り組んでまいりました。当社は、ビジネス ジェットやヘリコプターの利用を、日本における新しい移動の選択肢として文化に根付かせていくことを目指しております。本提携は、これまで培ってきた運航ノウハウを空飛ぶクルマ・eVTOL を含む次世代エアモビリティ 分野へ展開し、その可能性をさらに広げる重要な一歩であると認識しております。今後は、SkyDrive 様の技術力と当社の運航実務の知見を融合させ、日本における次世代エアモビリティの実現に向けた取り組みを一層加速してまいります。
以下はJapan Biz Aviationの発表
SkyDriveと「空飛ぶクルマ」の国内商業運航に向けた業務提携に関する基本合意書を締結
当社は、コンパクトな「空飛ぶクルマ」の開発・製造・販売を行う株式会社SkyDrive(本社:愛知県豊田市、代表取締役CEO福澤知浩、以下「SkyDrive」)と、日本国内における「空飛ぶクルマ」の商業運航に向けた業務提携に関する基本合意書を締結いたしましたので、お知らせいたします。
本合意は、日本国内における「空飛ぶクルマ」の商業運航に向け、SkyDrive、当社および機体購入者の役割分担や、運航開始時期等を含むロードマップについて、継続的に協議を進めるものです。当社は、国土交通省の認可(航空運送事業・航空機使用事業/東空事第29号)に基づく有償運航体制のもと、HondaJet等のビジネスジェットおよびBell429等のヘリコプターのチャーター運航、ならびに航空機の運航受託・管理事業を展開してまいりました。
また、航空機オーナーの皆様のご意向に寄り添いながら、安全を最優先とした高付加価値な航空移動サービスの提供に取り組むとともに、日本におけるジェネラルアビエーションの新しい所有・利用形態として、事業開始当初より航空機の共同所有スキームを展開し、個人・法人による航空機利用の裾野を拡げてまいりました。
当社は、ビジネスジェットやヘリコプターの利用を、日本における新しい移動の選択肢として文化に根付かせていくことを目指しております。
本合意は、これまで培ってきた運航実務の知見を、空飛ぶクルマ・eVTOLを含む次世代エアモビリティへ展開し、その可能性をさらに広げる重要な一歩であると考えております。今後は、SkyDriveの技術力と当社の運航実務の知見を融合させ、日本における「空飛ぶクルマ」の社会実装および次世代エアモビリティの実現に向けた取り組みを進めてまいります。
AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2026.7.9

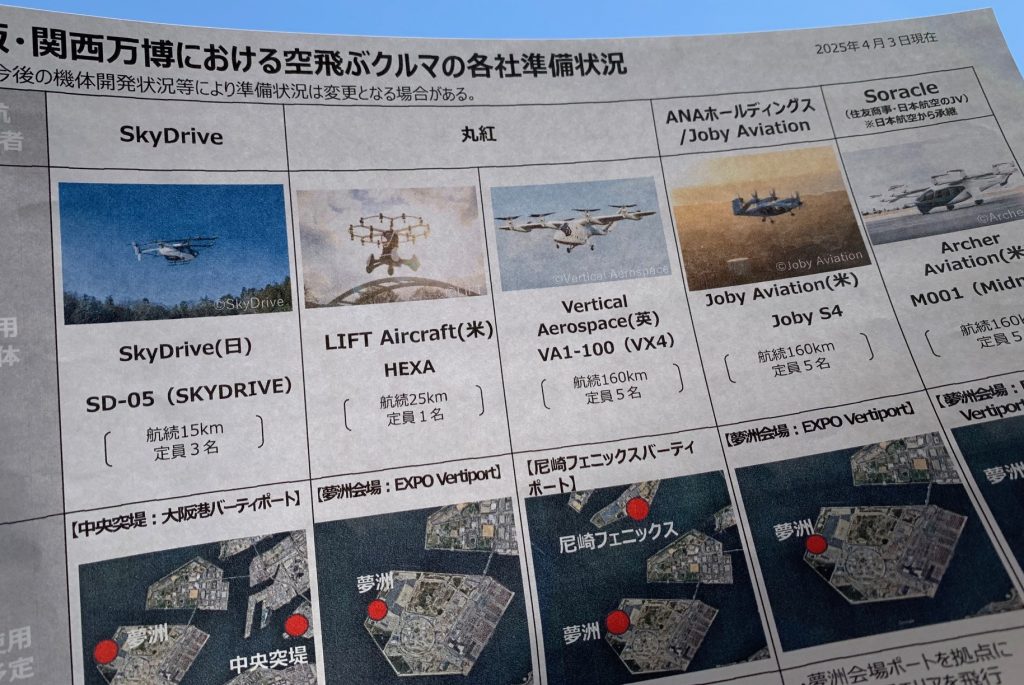
AAM開発の株式会社SkyDrive(豊田市<愛知県>)はインドネシアのヘリコプター運航大手ホワイトスカイ(PT Whitesky Aviation)と、SkyDriveの機体「SKYDRIVE (SkyDrive式SD-05型)」のフルスケールモックアップ展示を含めた展示、講演などのイベントを6月下旬にジャカルタ近郊で開催した。インドネシア政府関係者や関連産業関係者らを対象にしたイベントで、現地での実装への取り組みが進んでいることを印象付けた。SkyDriveが海外でフルスケールモックを展示したのはインドネシアが初めてだ。
エアタクシーなど想定し早ければ2029年に実装を
SkyDriveとWhiteskyは昨年(2025年)8月に業務提携契約を結び、導入に向けた取り組みを重ねてきた。議論を重ねる中で、活用法などの具体化が進んだため、関連するインドネシア政府関係者、鉱山開発関連事業者、プランテーション関係者、航空事業関係者らを対象に展示、講演などのイベントを開催した。
会場はWhiteskyの施設「チェンカレンヘリポート」で、ジャカルタ近郊のバンテン州タンゲランにあるインドネシア最大の国際空港スカルノハッタ国際空港に隣接していて、開場には政府、民間企業のトップなどが訪れ、実機の外観、内装、サイズ感、居住性などを確認したほか、都市部の深刻な渋滞や地方、島の移動など移動にかかわる課題などについて意見交換が行われた。
早ければ2029年の商用化を目指しており、ジャカルタでのエアタクシー用途、鉱山・採掘エリアでの作業員移動用途などを軸に期待認証などの取り組みを進める方針だ。
SkyDriveが7月3日に公表したプレスリリースには参加者の声や関係者のコメントが紹介されている。
プレスリリースの全文は以下の通りだ。(注釈、会社概要など除く)
SkyDrive インドネシアでの商用運航開始に向けて、 政府・産業界と官民一体の取り組みをスタート
〜海外初となる空飛ぶクルマ「SKYDRIVE」のフルスケールモックアップを展示、 インドネシア市場の具体的な需要を確認、政府との認証取得への取り組みを具体化~
コンパクトな「空飛ぶクルマ」の開発・製造・販売を行う株式会社SkyDrive(本社:愛知県豊田市、代表取締役CEO 福澤知浩、以下「SkyDrive」)は、インドネシア最大級のヘリコプター運航会社であり、遊覧サービス、貨物輸送、医療搬送を行うPT Whitesky Aviation (以下、「Whitesky」)と共同で、2026年6月23日から24日の2日間、スカルノハッタ国際空港に隣接するWhitesky所有のチェンカレン ヘリポートにて、政府関係者および、鉱山、農園等の関係者を対象とした、イベントを開催し需要を確認いたしました。
インドネシア共和国では、年間約65兆ルピアに達するとされるジャカルタ首都圏の交通渋滞による経済損失や、国内主要産業の一つであり、各州の域内総生産(GRDP)において大きな割合(全体合計の約10%)を占める鉱業、総面積1,500万ヘクタールを超える広大な農園地帯におけるインフラ未整備に伴う物流・災害対策の遅れなど、都市と地方の双方で深刻な社会課題を抱えています。
本イベントでは、SkyDriveとして海外で初めて「SKYDRIVE (SkyDrive式SD-05型)」 のフルスケールモックアップを展示し、これらのインドネシア特有の社会課題解決に向けた具体的な空飛ぶクルマのユースケースのディスカッションおよび提案を行いました。

SkyDriveの実物大モックアップの前に並ぶ、インドネシア観光・クリエイティブ経済省デジタル創造・技術担当副長官、ムハマド・ニール・エル・ヒマム氏、インドネシア政府、産業界の代表、SkyDriveのメンバーら(2026年6月24日、SkyDriveのプレスリリースから) ■背景およびこれまでの進捗
SkyDriveとWhiteskyは、2025年8月にインドネシアにおける「空飛ぶクルマ」の社会実装に向けた業務提携契約を締結し(※5)、継続的なディスカッションと事業計画の策定を共同で進めてまいりました。
両社は当初、ジャカルタ首都圏における深刻な社会課題である「慢性的な極度の交通渋滞」の解決を目指し検討をスタートしました。空港から都市中心地への速達性の向上は極めて重要なテーマであり、スカルノハッタ国際空港に隣接するチェンカレンヘリポートと、ジャカルタ中心地を結ぶ「都市型エアタクシー航路」の開設に向けた具体的な議論を先行して重ねてきました。
この都市部における渋滞対策を一歩進め、両社はさらに、インドネシアの持続可能な成長を支える地方の主要産業地帯(鉱山や農園など)が抱える特有の課題へと議論を広げてまいりました。
資源の採掘現場(カリマンタン島、スラウェシ島、スマトラ島など)は、陸路の道路インフラが未整備で悪路が多く、移動効率の低下や、週に数回発生する労働災害時の緊急搬送体制に課題を抱えています。
また、農業分野においても、パーム油などの大規模プランテーションでは、敷地が非常に広大であることから、従来のドローンでは森林火災の早期発見やパトロールといった広域監視に限界が生じていました。
都市型エアタクシーの検討から始まった両社の議論は、これら地方の産業現場特有の課題に対しても空飛ぶクルマがオペレーションコストの削減と環境負荷の低減を両立する有効な解決策になり得るという結論に至り、今回のイベント開催および具体的な地方ユースケースの開拓を本格化させることとなりました。
■想定ユースケース
これまでのディスカッションを通じて、初期に想定していた都市型エアタクシーに加え、地方の主要産業において以下のエリアおよび使用方法における空飛ぶクルマの導入検討が進んでいます。
1.都市型エアタクシー(ジャカルタ首都圏)
スカルノハッタ国際空港からジャカルタ中心地や周辺スマートシティ等への、大渋滞を回避した迅速な送客。
2.鉱山・採掘エリア(カリマンタン島、スラウェシ島、スマトラ島など)
悪路により車やバスでの移動に時間がかかる現場における「作業員やエンジニアの移動(シャトル運航)」や、週に数回発生する労働災害や自然災害に備えた「救急医師の緊急搬送(ドクターヘリ用途)」としての活用。
3.広大な農園エリア(パーム油、製紙、砂糖等のプランテーション)
ドローンでは航続距離が制限される広大な敷地において、敷地オーナーや管理会社による「サイトモニタリング(見回り・パトロール)」や、毎年乾季を中心に発生する「森林火災の早期発見・初期消火コントロール」への活用。
現在、これらの現場では一部移動手段としてヘリコプターが活用されていますが、空飛ぶクルマに置き換えることで、オペレーションコストの削減、および排出ガスや騒音問題の解決が期待されています。
■本イベントの概要
- 開催期間:2026年6月23日(火)~24日(水)
- 開催場所:インドネシア チェンカレン ヘリポート
- 主な来場者:
・ インドネシア政府関係者(日本の国土交通省と経済産業省にあたる省庁の方)
・ 大手鉱山開発企業
・ 大手農業・プランテーション関係者
・ 航空業界関係者
イベントでは、海外初出展となる「SKYDRIVE(SkyDrive式SD-05型)」のフルスケールモックアップを前に、政府や民間企業のトップ層が実際のサイズ感や居住性を体感し、インドネシアの地方や都市部における導入に向けた熱心な意見交換が行われました。また、来場者より、「鉱山でのシャトル運航や農園の広域監視といった地方産業の課題解決、さらには都市部の渋滞回避など、インドネシア特有の多様なビジネスケースに使える」「ヘリコプターに代わる新たな移動手段としての経済性や、最先端技術がもたらす新しい産業創出の可能性が魅力的」等の声があがりました。
■コメント
インドネシア観光・クリエイティブ経済省 デジタル創造・技術担当副長官
ムハマド・ニール・エル・ヒマム(Muhammad Neil El Himam)氏
SkyDrive社が開発を進める空飛ぶクルマの技術は、我が国のクリエイティブ経済に革新をもたらす『新たな顔』です。同社の先進技術の導入は、単なる移動手段の進化に留まらず、新たな知的財産や専門職の創出といった多大な経済価値を生み出すと確信しています。インドネシアが自ら新技術を開発・管理できる国となるためにも、SkyDrive社のようなグローバル企業と現地パートナーが一体となり、産学官連携で『完全なエコシステム』を構築していくことが不可欠です。モビリティの未来を前進させる同社の挑戦を歓迎し、強力に後押ししてまいります。
■コメント
インドネシア運輸省 航空性・運航局長
ソキブ・アル・ロフマン(Sokhib Al Rokhman, S.SiT., S.T., M.T.)氏
我が国は次世代モビリティの新技術を歓迎しており、民間企業の取り組みを高く評価しています。航空の安全性とセキュリティに一切の妥協はありませんが、既存の規制枠組みを活用し、実証実験の場として複数の空港を提供するなど、柔軟に法整備を進める準備があります。SkyDriveのような外国製機体の導入に向け、将来的に日本の国土交通省(JCAB)と証明検証プロセスの協定を締結し、円滑な連携を図りたいと考えています。早ければ2029年の商用化を目指す計画に合わせ、今後約3年間で安全な商業運用に向けた規制整備に全力で取り組んでまいります。
■今後の展望
SkyDriveとWhiteskyは、今回のイベントで得られた各業界からの具体的なニーズ(人員・物資輸送、救急搬送、農園監視等)を基に、商用運航に向けた実証実験の計画や機体認証プロセスの構築をインドネシア政府と共に官民一丸となり、推進してまいります。まずはカリマンタン等の鉱山エリアや、ジャカルタ首都圏でのエアタクシー路線におけるインフラの整備や運航体制の構築を進めてまいります。

AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2026.7.4

株式会社広島東洋カープ(広島市)は7月31日(金)~8月2日(日)にチームの本拠地、MAZDA Zoom-Zoomスタジアム広島(マツダスタジアム、広島市)で、ナイターの試合終了後にドローンの演出を含めた「ハローキティ&シナモロール ライブ&ドローンパフォーマンス」を開催すると発表した。マツダスタジアムでのドローンショー開催は今回が初めてとなる。
中日ドラゴンズ戦の試合後にグラウンド内で
マツダスタジアムでは7月31日、8月1日、2日に、いずれも午後6時から中日ドラゴンズとの試合を予定している。「ハローキティ&シナモロール ライブ&ドローンパフォーマンス」は各日開催される予定で、その中にドローンを使った演出が含まれる。
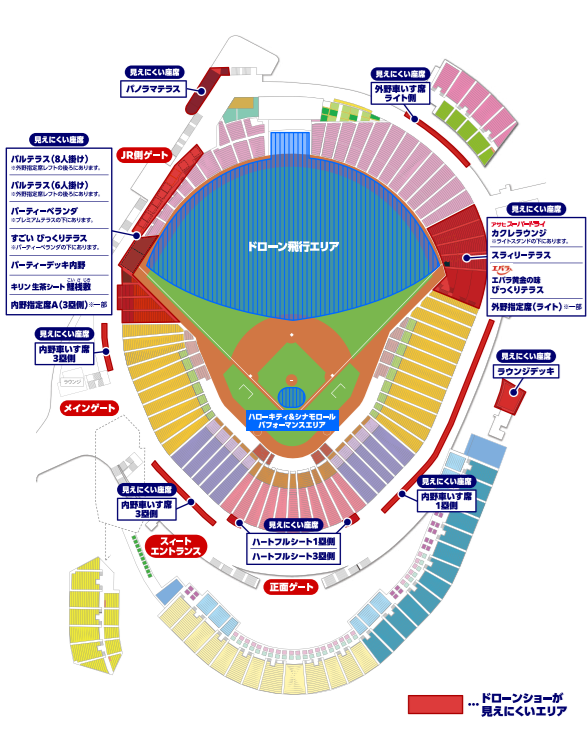
イベントでは各日の試合開始前の午後4時~4時20分に、スタジアムコンコースグッズショップ裏で「ハローキティ」「シナモロール」に会えるグリーティングが行われるほか、試合後のヒーローインタビューが終了したあとに、グラウンドの内野あたりで歌とダンスのパフォーマンスを披露するほか、外野あたりでドローンショーが行われる。
公式サイトには、天候により中止や内容変更の可能性を伝えているほか、ドローン飛行位置の都合によりスタジアムの一部エリアから見えにくい場合があることについて注意を促し、見えにくい場所についても案内している。またチケットの詳細についても公式サイトで確認できる。

AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2026.7.3

プロ野球球団を運営する株式会社横浜DeNAベイスターズ(横浜市)は、横浜・みなとみらいの臨港パークで、3500機のドローンを使うドローンショー「『YOKOHAMA STAR☆NIGHT DRONE SHOW』 in みなとみらいエリア」を7月26日に入場無料で開催すると発表した。開催時間などは未公表だ。ドローンショーの運営は株式会社レッドクリフ(東京)が担う。両社は9日後の8月4日から6日にかけても、横浜スタジアムで横浜DeNAベイスターズ対阪神タイガースの試合終了後に600機のドローンショーを行う。
8月4~6日には横浜スタジアムでも600機
横浜DeNAベイスターズが主催する「YOKOHAMA STAR☆NIGHT」は、みなとみらいで7月26日に予定される「『YOKOHAMA STAR☆NIGHT DRONE SHOW』 in みなとみらいエリア」と、8月4~6日に横浜スタジアムで行われる「『YOKOHAMA STAR☆NIGHT DRONE SHOW』in 横浜スタジアム」の2本立て。
このうち7月26日の「in みなとみらいエリア」では、3500機のドローンを飛ばす。ドローンの運航を担うレッドクリフは昨年(2025年)の大阪・関西万博で閉幕日の10月13日に3000機、今年(2026年)2月14日には東京・代々木公園で3030機を飛ばしていて、7月26日の「『YOKOHAMA STAR☆NIGHT DRONE SHOW』 in みなとみらいエリア」はそれを上回る規模になる予定だ。横浜・みなとみらいの臨港パークが観覧エリアになる。
なお荒天などに備え7月27日(月)を予備日としているほか、中止、内容の変更などの可能性もある。
また、ベイスターズの本拠地、横浜スタジアムでは8月4、5、6日に「『YOKOHAMA STAR☆NIGHT DRONE SHOW』in 横浜スタジアム」を開催し、600機のドローンと音・光・映像・花火を融合したショーを予定している。
『YOKOHAMA STAR☆NIGHT』は、2012年の横浜DeNAベイスターズ創設時から開催している夏のイベントとして定着していて、2014年以降は横浜銀行が後援するなどしている。ドローンショーは2019年に初めて行われこのときは100機が使われた。2024、2025年には500機のドローンでショーが行われた。
■「『YOKOHAMA STAR☆NIGHT DRONE SHOW』 in みなとみらいエリア」公式サイトはこちら
■横浜DeNAベイスターズの公式サイトはこちら
■レッドクリフのHPはこちら

©YDB ※画像はイメージです AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -



















































- ベイスターズ、みなとみらいで3500機のショーを7/26に無料開催 運営はレッドクリフ
- カープも本拠地でドローン演出 「ハローキティ&シナモロール ライブ&ドローンパフォーマンス」開催へ
- 【JapanDrone2026】ゼンムテックが撮影データの無意味化技術「ZENMU-AONT」公開
- 【JapanDrone2026】オートノミーダイナミクスが独自FC搭載の試作機Guardian Zero Ver.1を公開
- Prodorone、JIC系ファンド引受先に第三者割当 双方が発表
- 「おジャ魔女どれみ」のドローンショー7月開催 ドローンショー・ジャパン、東映デジマが主催
- 【JapanDrone2026】来場者は2万人超 各賞も決定
- SkyDrive、チャーター運航のジェイビズと提携 日本国内の運航体制構築へ
- 米Sky Elementsが400機でW杯の結果表示 Visit Seattleの企画「ドローン・スコアボード」
- 石川エナジーとマゼックスが提携 高精度調査技術と重量運搬の統合目指す