- 2020.10.13

ロボット開発支援を手掛ける株式会社アトラックラボ(埼玉県三芳町、伊豆智幸代表取締役)は、ドローンの国産化に必要な技術のサポートサービスを開始したと発表した。利用者が持つドローンに海外製フライトコントローラーが搭載されている場合に、それをオープンソースでカスタマイズすることなどを念頭に置いており、伊豆智幸代表は、「大掛かりな開発ではなく、使いやすくしたい人や、実用機を自作したい人の手助けをしたい」と説明している。
ArduPilot系「The Cube」活用し独自カスタマイズも 伊豆氏「使い方支援に近い」
アトラックが開始した想定している開発支援サービスは、ドローンの開発で敷居が高いとされるフライトコントローラーやコンパニオンコンピューターなどが中心になると想定している。サービスではArduPilot系で、採用実績も多い「The Cube」(Pixhawkオートパイロットの進化版)を使うことで、相談者の海外製ドローンなどのカスタマイズ需要や独自開発の相談に応じる。「The Cube」は、台湾と米国で生産されているが、オープンソースのため日本で独自ハードを製作したりカスタマイズしたりすることが可能だ。
支援には、フライトコントローラーの使用方法の伝授、コントロールソフトウエアのカスタマイズ、AI処理を行うコンパニオンコンピューターの接続、開発支援を含む。ほかにもフレームの設計支援、カーボンやアルミ部品の製造支援、モーターやESC(モータードライバー)の選定、調達など、ドローンを組み上げるのに必要な支援も行う。
また、アトラックラボで設計・製造した、汎用フレームの部品供給も行っており、様々なアプリケーションに対応する独自ドローンが作れる。
今後は、各地のパートナーと、運用やトレーニングを企画し、国産ドローンの開発・運用を支援する方針という。
伊豆代表は「使いたい、使いやすいドローンにする、作る、という意味では、“開発支援”ではありますが、“使い方支援”に近いかもしれません。フライトコントローラーは、オープンソースでカスタマイズしようとしても、パラメータが多く、何から始めたらいいのかがわかあらないという声を多く聞きます。実際、オープンソースには日本語の説明もなく、日本人にはわかりにくい面はありますのでそんなところもサポートしたい」と話している。
想定しているのは大掛かりな開発よりも「ゆるく作りたい人のサポート」という。「たとえば農業従事者であれば、散布のためのドローンを自分でつくりたいとか、粒剤をまくためのアタッチメントを取り付けたい、といったケースなどを考えています」(伊豆代表)。
さらに、「ロボット、という話題になると、他人ごとになってしまう傾向が多いのではないかと思っています。大企業や大資本でないとできないこともありますが、実はそればかりではないし、それほど手をかけなくてもできることがあります。マニュアルで飛ばすとか、簡単なミッションで飛ばすといったことなら大掛かりなことではなく、身近でできる。そんな成功体験を味わってほしいとも思っています」と話している。
アトラックラボのメールアドレス:sales@attraclab.com
アトラックラボのホームページ:http://attraclab.com
「The Cube」(左)などを活用することを念頭に置いて開発支援サービスをはじめたアトラックラボの伊豆智幸代代表取締役(右下) AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2020.7.26
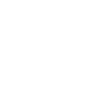
JapanDrones株式会社(本社:長野県、代表:Randy Mackay氏)とドローンジャパン株式会社(本社:東京、代表:勝俣喜一朗)が協働で運営しているドローンエンジニア養成塾は2020年7月19日、同塾の塾生から選ばれた代表者による成果発表会&デモイベントを軽井沢で開催した。会場では養成塾の1~9期生から10組が集まり研究成果を発表し、屋外でデモンストレーションを披露した。日本で実力をつけてきたドローンエンジニアの研究の最前線である発表会とその成果が目の前で見られるデモンストレーションの様子をレポートする。(田中亘)
ドローン業界におけるArduPilotとは

ドローンエンジニア養成塾が開催した成果発表会&デモイベント=2020年7月19日、長野・軽井沢 発表会の冒頭、ドローンジャパンの春原久徳取締役会長が登壇し、「ドローン業界におけるArduPilot」と題した挨拶を行った。
春原氏は、2014年にビジネスとしてドローンに関わってきた自身の歴史を振り返り、2015年にドローンコードで有名だった3D Roboticsのクリス・アンダーセン氏と知り合い、軽井沢に住むカナダ人のRandy Mackay氏を紹介された経緯を語った。Mackay氏の快諾により、2016年からドローンエンジニア養成塾はスタートした。春原氏は、塾の経緯を語ったあとに、ドローンエンジニア養成の中心となるArduPilot(アルデュパイロット)について説明した。
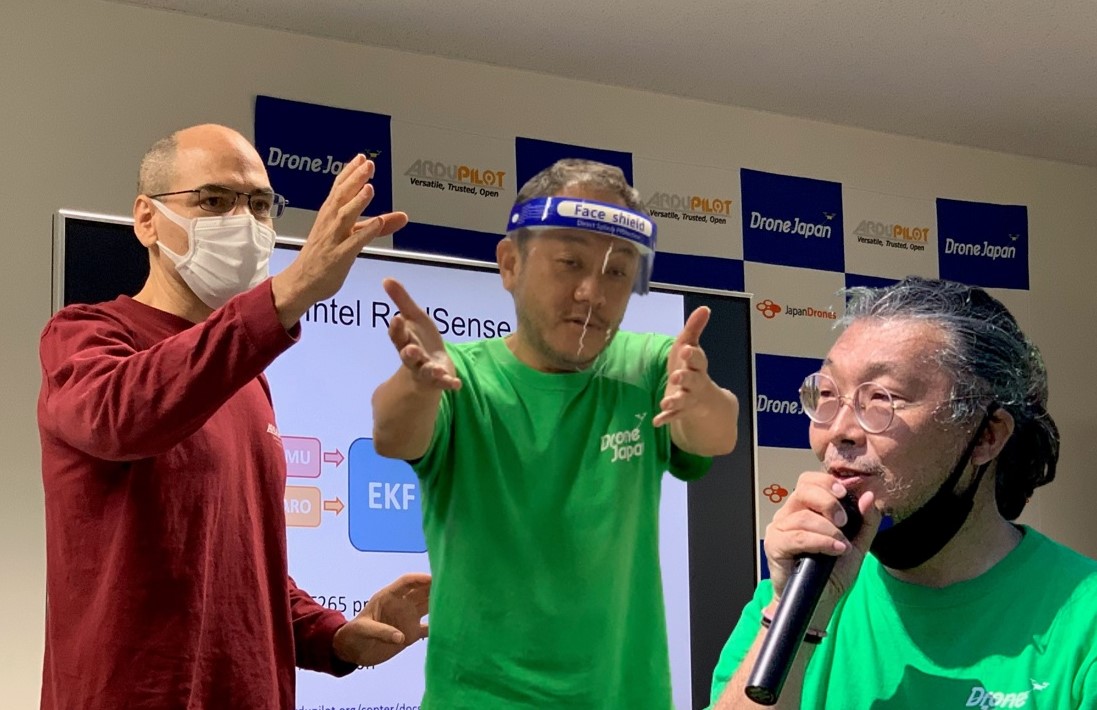
ドローンのプログラミングについて説明するドローン・ジャパンの春原久徳会長 まず、春原氏はドローン関連のプログラムの種類について整理した。大きく3つに分けられ、それぞれ、ドローンの飛行そのものを司る「機体制御」、ドローンの航行を管理する「機体管理」、ドローンで集めたデータを処理する「情報処理」だ。
このうち、「機体制御」に不可欠な、オープンソースのフライトコントローラーがArduPilotだ。
ArduPilotは、ドローンに搭載されたPixhawkなどのオンボードコンピュータで動作するソフトウェア。Pixhawkのコネクタを介して、モーターの回転を制御したり、GPS機器からの位置情報などを処理したりする。また、各種センサーやコンパニオンコンピュータなどと連動して、より安全な機体制御や衝突回避を行う。
一方の「機体管理」では、Mission Plannerに代表される航行管理ソフトによって、ドローンの自律飛行を支援する。ドローン養成塾では、オープンソースで誰もが自由に利用できるArduPilotやMission Plannerの技術を教えることで、日本のドローン技術者の育成やスキルの底上げに貢献してきた。春原氏は「ArduPilotの魅力は、ソースコードがオープンなので、技術者がテクノロジを理解しつつ、自由にドローンソフトウェアが開発できる点にあり、技術者のワクワク感を喚起します」と話した。
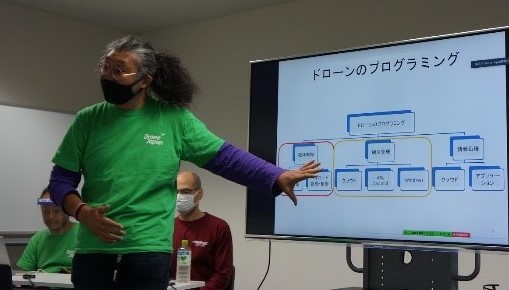
その成果を塾生同士で実感してもらうために、1~9期の卒業生の中から10組とRandy氏が発表会に参加した。
発表者と内容は以下の一覧の通りだ。
ArduPilotの技術概要と最新動向
続いて、ArduPilotの技術概要と最新動向を伝えるために、塾長のRandy Mackay氏が登壇した。
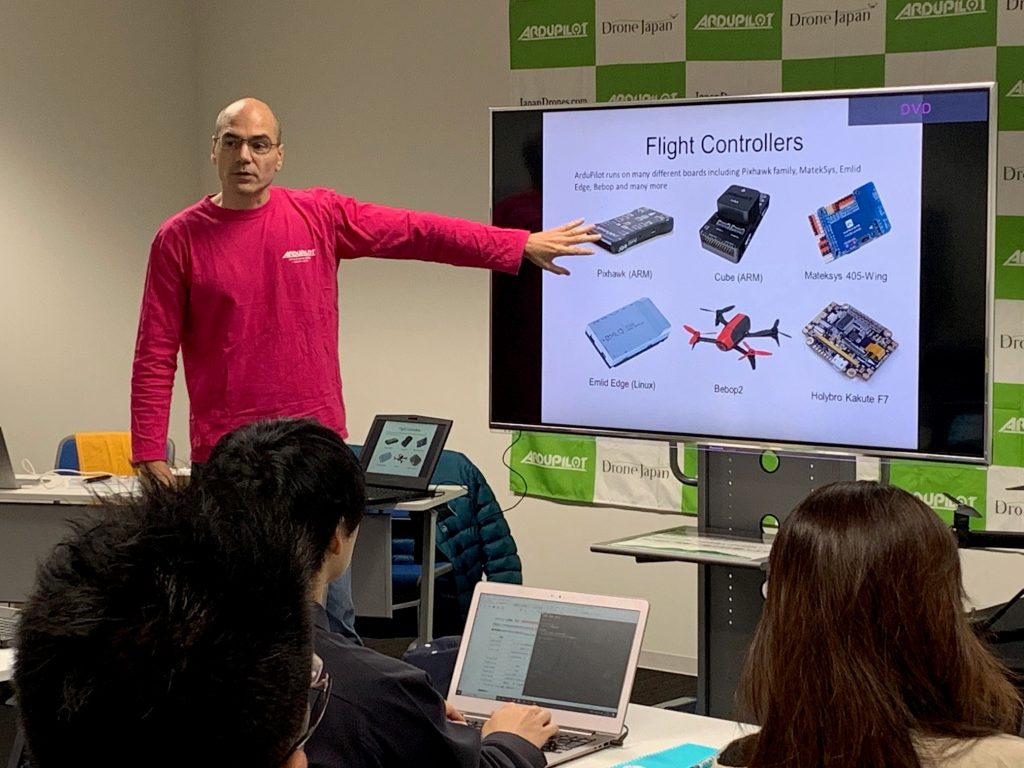
Mackay氏は、ArduPilotの利活用を促進する最新デバイスとして、高性能なフライトコントローラーの最新機器を紹介した。その特長について Mackay氏は「最新のフライトコントローラーは、メモリとCPUが、5倍から10倍に進化しています。そのおかげで、開発言語のC++だけではなく、Lua Scriptが使えるようになりました」と説明した。Lua Scriptは、汎用スクリプト言語で、Perl、Python、Rubyと比較して高速に動作する。

注目の最新ハードウェアについて説明するドローンエンジニア養成塾のRandy Mackay代表 Mackay氏が紹介したフライトコントローラーの多くは、CPUにSTM H7を採用し、衝突回避や非GPS下でのナビゲーションを可能にしている。加えて、ADSBによる有人飛行機の確認や、高信頼のIMUによる自律飛行のサポートなどが特徴だ。
次にMackay氏は、GSFというソフトウェアを紹介した。GSFは、複数のコンパスから得られた情報を判断して、正しい方向を見出す技術。単一のコンパスで飛行しているドローンは、地面に金属が置かれていたり、強い磁力が発生したりすると、方向を見失う危険がある。それに対して、GSFを利用すると、複数のコンパスから収集される情報を判断して、正しい方向を計算する。その様子を紹介した動画が映し出された。
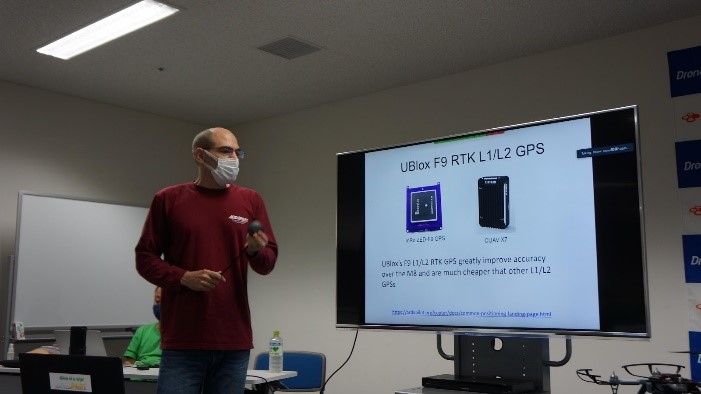
さらに、飛行の安定性に貢献する最新デバイスとして、UBlox F9 RTK L1/L2 GPSが紹介された。
従来のGPS機器では、3m前後の測位ミスが起きてることがある。しかしこのUBloxF9 RTK L1/L2 GPSでは、GPSだけで75cm以下の精度があり、RTKを組み合わせると10cm以下の精度が得られる。特筆すべきは価格で、3万円から購入することが可能だ。それまで40万円以上が相場だった高精度GPSが、各段と安価で手に入れられるようになった。
低価格で高性能なGPSを紹介するMackay氏 最後にMackay氏は、インテル製の3Dカメラを紹介した。
そのひとつ、Intel D435 Depth Cameraは、深度計測が可能なカメラで、もうひとつのIntel T265 3D Cameraは物体の距離や位置を3次元に計測できるカメラだ。これらのカメラを活用することで、非GPS下でも飛行ナビゲーションや衝突回避が可能になる。実際に海外のエンジニアがD435カメラを搭載して屋内で衝突を回避する様子が動画で紹介された。
成果発表会はRandy Mackay氏の講義に続き、参加10組のプレゼンテーションに移った。それぞれがこれまでに力を入れてきた研究成果を披露した。
その様子は次回にお届けする。(続く)
TAG
AUTHER
 田中 亘
田中 亘 -














 新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築
新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築  NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」
NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」  下水道の点検から補修まで一体化 埼玉県でNTT東やイードローンなど8者が共同研究
下水道の点検から補修まで一体化 埼玉県でNTT東やイードローンなど8者が共同研究  SkyDrive福澤代表、特派員協会の会見でコンパクトの優位性アピール 日本製へのこだわりも説明
SkyDrive福澤代表、特派員協会の会見でコンパクトの優位性アピール 日本製へのこだわりも説明  「JUIDA新年の集い」東京會舘で開催 総選挙公示日と重なり政治家の姿なし
「JUIDA新年の集い」東京會舘で開催 総選挙公示日と重なり政治家の姿なし  エアロジーラボのG4-S、往復72㎞を無給油で飛行 九州整備局が南海トラフ対策の実験
エアロジーラボのG4-S、往復72㎞を無給油で飛行 九州整備局が南海トラフ対策の実験  ブルーがドーム屋根の漏水箇所特定にドローン活用 ELIOS3が内装側を飛行、外装はMatrice 3TD
ブルーがドーム屋根の漏水箇所特定にドローン活用 ELIOS3が内装側を飛行、外装はMatrice 3TD  林野火災対応のブルー、富士山DB、プロドローンにJUIDAが感謝状 ヘリと運航調整しつつ情報収集
林野火災対応のブルー、富士山DB、プロドローンにJUIDAが感謝状 ヘリと運航調整しつつ情報収集  Japan Drone出展者向け説明会開催 民生利用目的を強調「攻撃技術、展示の対象外」
Japan Drone出展者向け説明会開催 民生利用目的を強調「攻撃技術、展示の対象外」  音楽とドローンの2026年への期待 2025年には「RED LINE」や「ジ・エンプティ」話題
音楽とドローンの2026年への期待 2025年には「RED LINE」や「ジ・エンプティ」話題