- 2020.7.26
日本で実力をつけてきた「ドローンエンジニア養成塾成果発表」レポート①
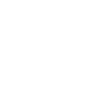
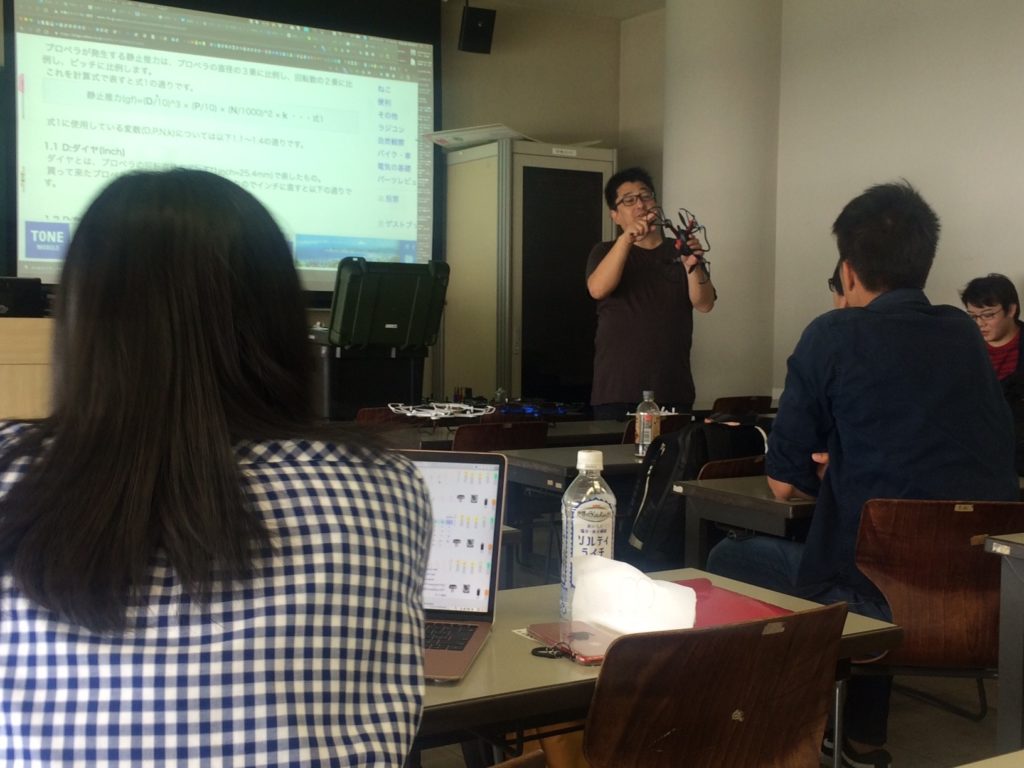
JapanDrones株式会社(本社:長野県、代表:Randy Mackay氏)とドローンジャパン株式会社(本社:東京、代表:勝俣喜一朗)が協働で運営しているドローンエンジニア養成塾は2020年7月19日、同塾の塾生から選ばれた代表者による成果発表会&デモイベントを軽井沢で開催した。会場では養成塾の1~9期生から10組が集まり研究成果を発表し、屋外でデモンストレーションを披露した。日本で実力をつけてきたドローンエンジニアの研究の最前線である発表会とその成果が目の前で見られるデモンストレーションの様子をレポートする。(田中亘)
ドローン業界におけるArduPilotとは

ドローンエンジニア養成塾が開催した成果発表会&デモイベント=2020年7月19日、長野・軽井沢 発表会の冒頭、ドローンジャパンの春原久徳取締役会長が登壇し、「ドローン業界におけるArduPilot」と題した挨拶を行った。
春原氏は、2014年にビジネスとしてドローンに関わってきた自身の歴史を振り返り、2015年にドローンコードで有名だった3D Roboticsのクリス・アンダーセン氏と知り合い、軽井沢に住むカナダ人のRandy Mackay氏を紹介された経緯を語った。Mackay氏の快諾により、2016年からドローンエンジニア養成塾はスタートした。春原氏は、塾の経緯を語ったあとに、ドローンエンジニア養成の中心となるArduPilot(アルデュパイロット)について説明した。
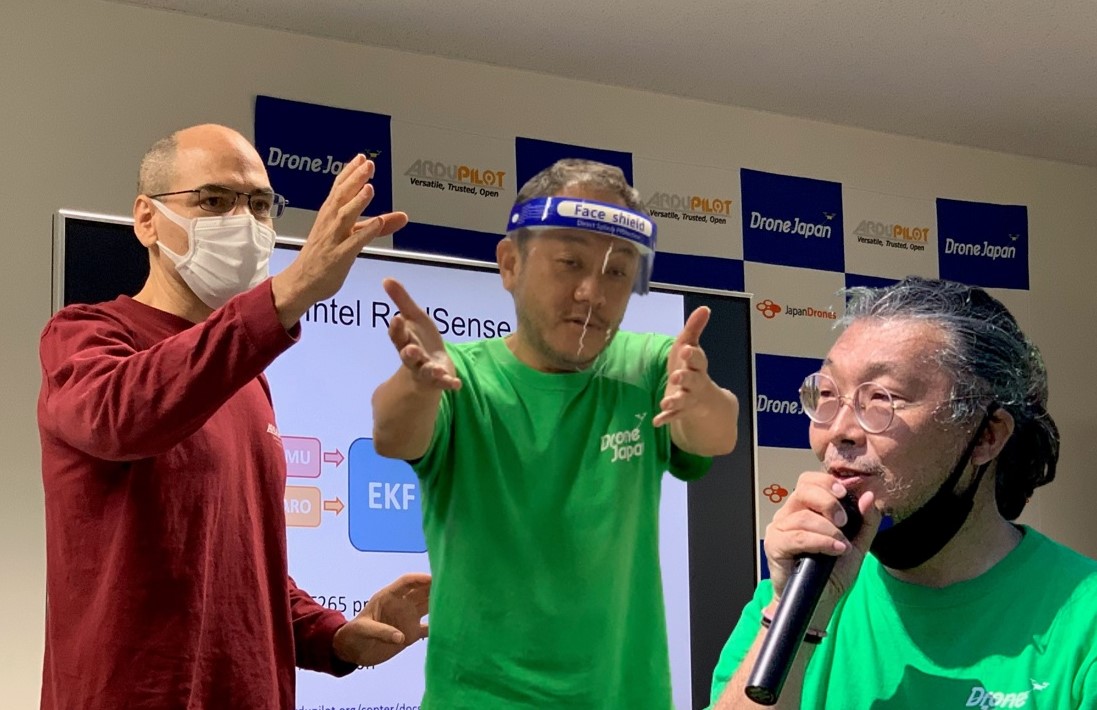
ドローンのプログラミングについて説明するドローン・ジャパンの春原久徳会長 まず、春原氏はドローン関連のプログラムの種類について整理した。大きく3つに分けられ、それぞれ、ドローンの飛行そのものを司る「機体制御」、ドローンの航行を管理する「機体管理」、ドローンで集めたデータを処理する「情報処理」だ。
このうち、「機体制御」に不可欠な、オープンソースのフライトコントローラーがArduPilotだ。
ArduPilotは、ドローンに搭載されたPixhawkなどのオンボードコンピュータで動作するソフトウェア。Pixhawkのコネクタを介して、モーターの回転を制御したり、GPS機器からの位置情報などを処理したりする。また、各種センサーやコンパニオンコンピュータなどと連動して、より安全な機体制御や衝突回避を行う。
一方の「機体管理」では、Mission Plannerに代表される航行管理ソフトによって、ドローンの自律飛行を支援する。ドローン養成塾では、オープンソースで誰もが自由に利用できるArduPilotやMission Plannerの技術を教えることで、日本のドローン技術者の育成やスキルの底上げに貢献してきた。春原氏は「ArduPilotの魅力は、ソースコードがオープンなので、技術者がテクノロジを理解しつつ、自由にドローンソフトウェアが開発できる点にあり、技術者のワクワク感を喚起します」と話した。
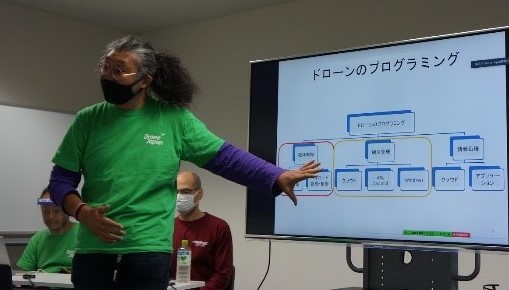
その成果を塾生同士で実感してもらうために、1~9期の卒業生の中から10組とRandy氏が発表会に参加した。
発表者と内容は以下の一覧の通りだ。
ArduPilotの技術概要と最新動向
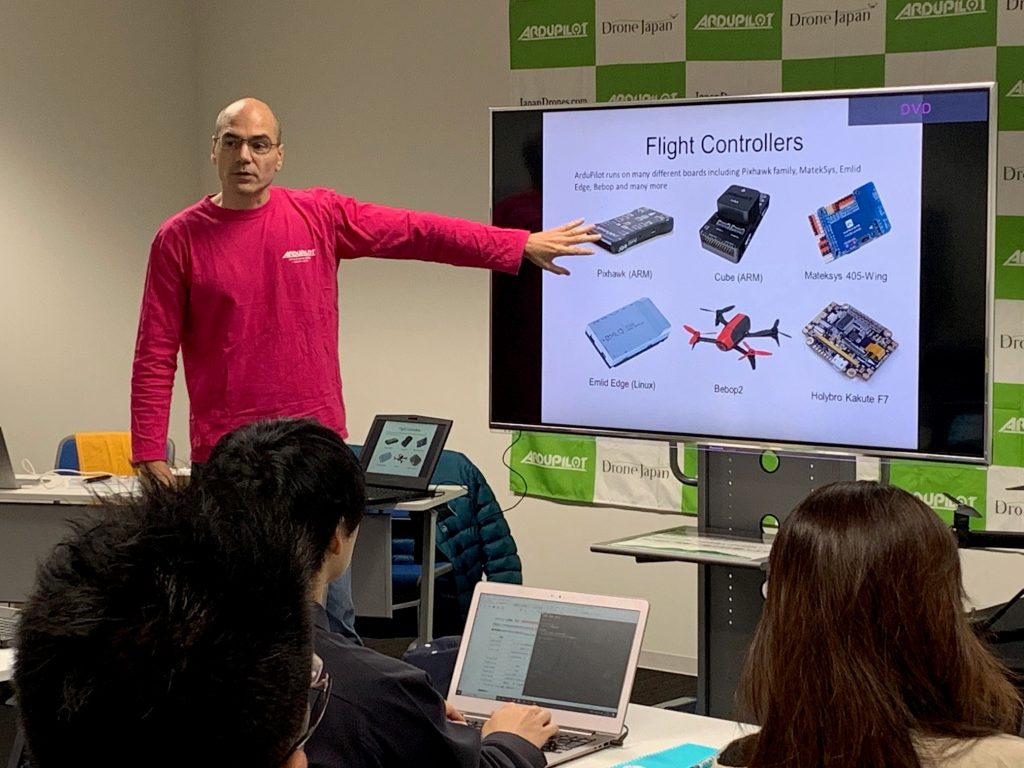
続いて、ArduPilotの技術概要と最新動向を伝えるために、塾長のRandy Mackay氏が登壇した。
Mackay氏は、ArduPilotの利活用を促進する最新デバイスとして、高性能なフライトコントローラーの最新機器を紹介した。その特長について Mackay氏は「最新のフライトコントローラーは、メモリとCPUが、5倍から10倍に進化しています。そのおかげで、開発言語のC++だけではなく、Lua Scriptが使えるようになりました」と説明した。Lua Scriptは、汎用スクリプト言語で、Perl、Python、Rubyと比較して高速に動作する。

注目の最新ハードウェアについて説明するドローンエンジニア養成塾のRandy Mackay代表 Mackay氏が紹介したフライトコントローラーの多くは、CPUにSTM H7を採用し、衝突回避や非GPS下でのナビゲーションを可能にしている。加えて、ADSBによる有人飛行機の確認や、高信頼のIMUによる自律飛行のサポートなどが特徴だ。
次にMackay氏は、GSFというソフトウェアを紹介した。GSFは、複数のコンパスから得られた情報を判断して、正しい方向を見出す技術。単一のコンパスで飛行しているドローンは、地面に金属が置かれていたり、強い磁力が発生したりすると、方向を見失う危険がある。それに対して、GSFを利用すると、複数のコンパスから収集される情報を判断して、正しい方向を計算する。その様子を紹介した動画が映し出された。
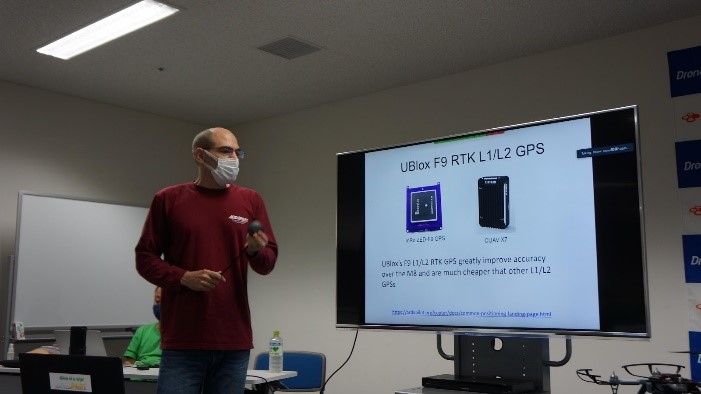
さらに、飛行の安定性に貢献する最新デバイスとして、UBlox F9 RTK L1/L2 GPSが紹介された。
従来のGPS機器では、3m前後の測位ミスが起きてることがある。しかしこのUBloxF9 RTK L1/L2 GPSでは、GPSだけで75cm以下の精度があり、RTKを組み合わせると10cm以下の精度が得られる。特筆すべきは価格で、3万円から購入することが可能だ。それまで40万円以上が相場だった高精度GPSが、各段と安価で手に入れられるようになった。
低価格で高性能なGPSを紹介するMackay氏 最後にMackay氏は、インテル製の3Dカメラを紹介した。
そのひとつ、Intel D435 Depth Cameraは、深度計測が可能なカメラで、もうひとつのIntel T265 3D Cameraは物体の距離や位置を3次元に計測できるカメラだ。これらのカメラを活用することで、非GPS下でも飛行ナビゲーションや衝突回避が可能になる。実際に海外のエンジニアがD435カメラを搭載して屋内で衝突を回避する様子が動画で紹介された。
成果発表会はRandy Mackay氏の講義に続き、参加10組のプレゼンテーションに移った。それぞれがこれまでに力を入れてきた研究成果を披露した。
その様子は次回にお届けする。(続く)
TAG
AUTHER
 田中 亘
田中 亘 -




 JR東の「ドローンDX CHAMPIONSHIP」が高輪ゲートウェイで開幕 駅そっくりコースをIBIS2が白熱レース
JR東の「ドローンDX CHAMPIONSHIP」が高輪ゲートウェイで開幕 駅そっくりコースをIBIS2が白熱レース  山梨県、JAL、大学などとパイロットレスAAMの社会受容性向上で協定
山梨県、JAL、大学などとパイロットレスAAMの社会受容性向上で協定  ブルーイノベーション2日連続ストップ高 ほかのドローン株も大統領令や米中協議進展など好感
ブルーイノベーション2日連続ストップ高 ほかのドローン株も大統領令や米中協議進展など好感  【JapanDrone2025】過去最大285社で第10回開幕 初公開、新規発表など続々、ダンサーも登場
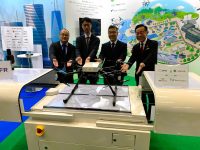
【JapanDrone2025】過去最大285社で第10回開幕 初公開、新規発表など続々、ダンサーも登場  【JapanDrone2025】ブルー、VFRなど4社の国産ポート試作機公開 「2027年の実装、量産化を」
【JapanDrone2025】ブルー、VFRなど4社の国産ポート試作機公開 「2027年の実装、量産化を」  【JapanDrone2025】過去最高の来場者を迎え閉幕 前年比8.3%増の23049人
【JapanDrone2025】過去最高の来場者を迎え閉幕 前年比8.3%増の23049人  ACSLが前CEOの「不適切取引」解明の調査委設置を発表 7月めどに報告書
ACSLが前CEOの「不適切取引」解明の調査委設置を発表 7月めどに報告書  ダイヤサービス、応急手当の協賛募集 「負傷者の手当てを知っている人を育成する講座の普及を」
ダイヤサービス、応急手当の協賛募集 「負傷者の手当てを知っている人を育成する講座の普及を」  CSPI-EXPO2025、4日間で5万7362人来場 前回比1万人増
CSPI-EXPO2025、4日間で5万7362人来場 前回比1万人増  ACSLストップ安 「不適切取引」発表で嫌気売り殺到
ACSLストップ安 「不適切取引」発表で嫌気売り殺到



東京株式市場グロース市場で7月2日、ACSL株がストップ安となった。午前9時29分にいったん1187円で寄り付いたがその後も売りが殺到し、再び取引の成立したない売り気配で推移した。ACSLは前日の7月1日、前CEOによる不適切取引判明を発表していて嫌気を誘ったとみられる。
いったん寄り付きその後売り気配に
ACSL株は取引き開始前から売り注文を集めていて、取引開始がはじまったしばらく値が付かないまま推移した。午前9時29分に値幅制限いっぱいいの、前日終値比300円安のストップ安となる1187円で取引が成立したが、その後も売りは止まらず、再び取引が成立しない展開が続いた。
ACSLが7月1日に発表した「お知らせ」はこちら
AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。株式会社ACSLは7月1日、今年4月30日に退任した鷲谷聡之前代表取締役CEOが不適切な取引を行っていたとして、全容解明のため外部の弁護士と社外取締役の4人で構成する特別調査委員会を設置したと発表した。ACSLは業績に与える影響は精査中で、過年度業績への影響はないと見込んでいる。特別調査委員会7月中旬をめどに最終報告書をまとめる見込みだ。
「立場利用し業者と実態のない取引」
ACSLによると前CEOによる「個人的な経済状況に関する懸念」が3月に浮上し、4月に社内調査に着手した。調査で「(前CEOが)代表取締役の立場を個人的に悪用して、2025 年3月から、一部業者との間で実態のない不適切な取引を行っていた事実が判明」したという。ACSLは全容解明、厳正な対処、再発防止策構築を目的に7月1日の取締役会で特別調査委員会設置を決議した。
ACSLは「特別調査委員会による調査に全面的に協力し、早急に調査を進めてまいります。また、特別調査委員会による調査の結果、明らかとなった事実関係等につきましても、受領次第速やかに開示いたします」とコメントしている。
ACSLの発表はこちら。
AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。- 2025.7.1

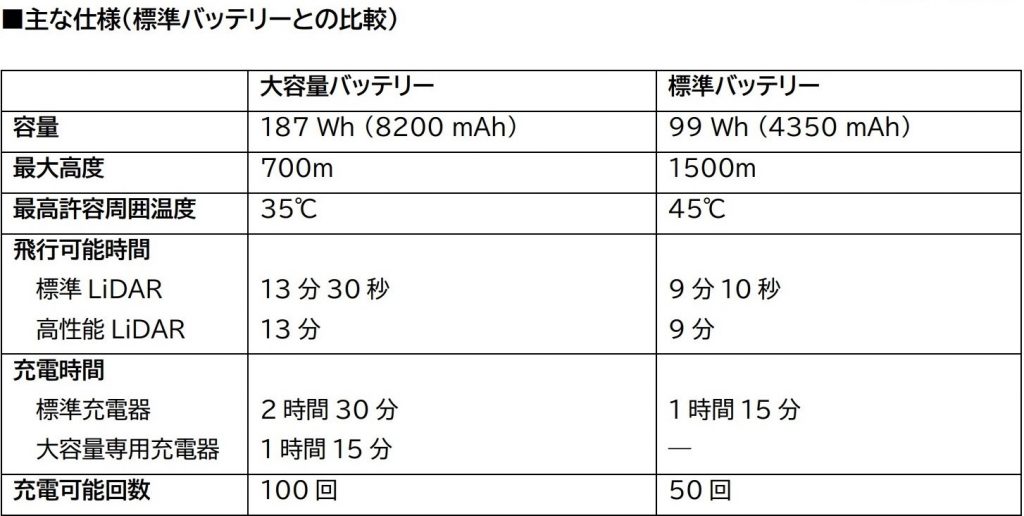
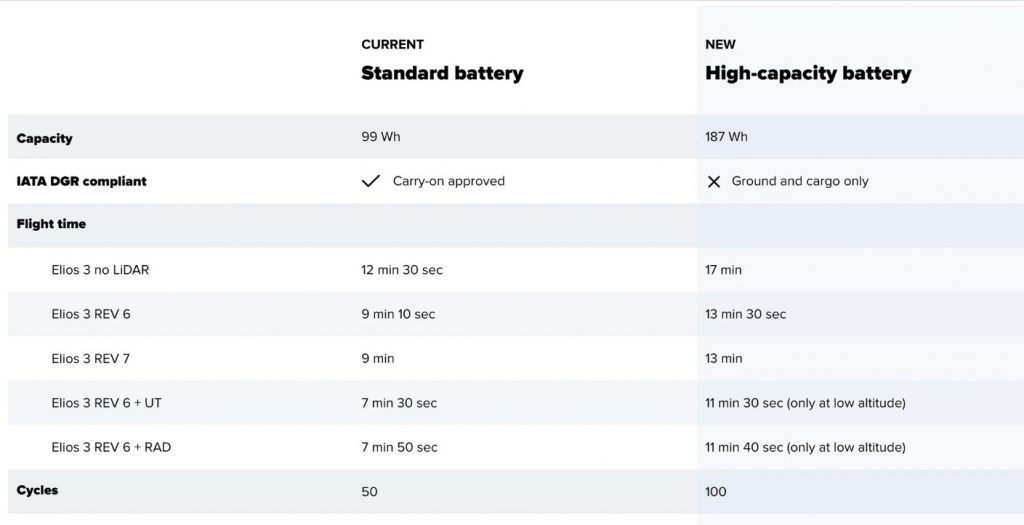
スイスのドローンメーカーフライアビリティ社(Flyability SA)は、屋内点検用球体ドローン「ELIOS 3」用の新しい大容量バッテリーを発表し、6月26日に販売を始めた。日本でも同社の正規販売代理店ブルーイノベーション株式会社(東京)が6月27日に発売を発表した。新しい大容量バッテリーを使うと1回の充電で、Rev 6 LiDARを搭載した場合の飛行時間が13分30秒となり、標準バッテリーの9分10秒から47%増えるという。
ブルー「点検業務の安全性と効率性が大幅に向上」
発表によると、ELIOS3用の新しい大容量バッテリーの容量は187Wh(8200mAh)と標準バッテリーの99Whから増強された。LiDAR搭載時の飛行時間を9分10秒が13分30秒に増やすことで作業効率を高める。なお、ペイロードがない場合の飛行時間は17分(標準バッテリーでは12分50秒)、UTペイロードを搭載した場合は11分30秒(標準バッテリーでは7分30秒)だ。また推奨充電サイクル(推奨充電回数)も標準バッテリー(50回)の2倍の100回になる。充電時間は大容量バッテリー専用の充電器を使えば、標準バッテリーと同じ1時15分だ。
一方、使用可能な周囲の気温は従来の45度から35度にかわるので注意が必要だ。
利用にあたって利用者はユーザーマニュアルを理解することとファームウェアのアップデートが義務付けられる。
ELIOS3は、コンピュータービジョン、LiDARテクノロジー、NVIDIAのグラフィックエンジンを独自に組み合わせた「Flyaware」と呼ぶSLAMエンジンを搭載する屋内点検ドローンで、屋内を飛行中に自己位置を高い制度で推定し、リアルタイムで3Dマップを作成したうえパイロットの手元のタブレットにもリアルタイムに表示するなど屋内点検に求められる機能を集めている。GeoSLAMsソフトウェアパッケージとの統合で三次元データ化も可能だ。Flyabilityが英Cygnus Instruments(シグナス・インスツルメンツ社)との提携で開発され、2024年5月に導入された「UT 検査ペイロード」を使えば、立ち入り不可能な空間内の高い場所や狭小空間で、超音波による壁面の厚さ測定も可能だ。
フライアビリティ社は大容量バッテリーを、フライト最適化への取り組みを強化する技術と位置付けている。今年(2025年)4月に搭載したスマートRTH(Smart Return-to-Home)から始まっていて、最短の安全なルートで出発点に戻る機能や、バッテリー交換後にElios 3が自律的にスマートRTH発動地点に正確に戻りミッションを再開、継続するという。フライアビリティは「これにより飛行時間が短縮され、運用効率が向上し、パイロットはバッテリーや飛行時間の管理ではなく、最も重要なデータ収集に集中することができる」と発表している。
ブルーイノベーションも「これにより、パイロットはより余裕をもった飛行計画を立てることができ、点検業務の安全性と効率性が大幅に向上します。さらに、充電可能回数が従来の2倍に増加したことで、バッテリーの交換頻度と運用コストの削減にも貢献します」とコメントしている。
ブルーイノベーションの発表はこちら
フライアビリティ社の説明はこちら

左が大容量バッテリー、右は標準バッテリー AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2025.6.30

千葉・幕張メッセで6月18~21日に開催された建設、測量技術の展示会「第8回国際 建設・測量展」(CSPI-EXPO2026)の主催団体、「国際建設・測量展実行委員会」は、期間中の来場者が合計で5万7362人だったと発表した。前回実績を21.3%上回った。
DJI、AMUSE ONESELFなどJapanDrone不参加組も
来場者は全体で前回実績(4万7294人)より1万以上増えた。来場者の内訳は業界来場者が45700人で全体の79.7%を占めた。「VIP」が4781人、報道関係者が45人、来賓が50人、一般来場者は6786人だった。主催者はこの数字は確認作業後、修正の可能性があると伝えている。
ドローン事業者の出展者も多く、今回もDJI JAPAN、AMUSE ONESELF(アミューズワンセルフ)、スペースワン、エアロセンス、テラドローン、ジュンテクノサービス、CHCNAV、セキド、システムファイブ、ブルーイノベーションなどがブースを構えた。
DJI JAPAN、AMUSE ONESELFなどのように、ドローンの展示会にブースを構えていない顔ぶれや、スペースワンなどのようにJapan Droneの出展と異なる展示構成が見どころとなった。
DJI JAPANは産業用ブランド「DJI ENTERPRISE」を前面に押し出して、「MATRICE 400」や「DJI Dockシリーズなどを展示した。CSPIの公式ページでは「Matrice 350 RTK」の展示を予告していたが、新型機が発表されたことから「MATRICE 400」が展示の中心になった。映像伝送システムが一新され制御感覚が格段に向上し効率性が向上したバッテリーシステム、包括性が高まった安全機能、パワフルな積載性能などが話題を集めブースでも多くの来場者が足を止めていた。
DJI Dockシリーズでも最新機、DJI Dock 3が展示の中心で、DJI Matrice 4D、またはMatrice 4TDの高性能ドローンを搭載し24時間365日のリモート操作を可能になったことで話題を集めた。このほかフレームベースのLiDAR、独自開発の高精度IMUシステムを備えるZenmuse L2は、フルサイズセンサーカメラと交換可能な単焦点レンズを3軸ジンバルスタビライザーに搭載するZenmuse P1は、広角カメラ、ズームカメラ、赤外線サーマルカメラ 、レーザー距離計、NIR補助ライトの5つの主要モジュールを搭載するZenmuse H30シリーズも展示された。
ブースでは連日、講演も開催。DJI Dockの活用法のほか、このところドローン事業者の間で話題の機体認証などが取り上げられ、多くの来場者が足を止めていた。DJI JAPAN標準化政策ディレクターの浦野靖弘さんは「ソリューションを求める来場者に関心をもっていただけた」と話していた。
スペースワンは6月上旬のJapanDroneで話題になった大きなLEDディスプレイをCSPIににも投入し、入口に近い場所で来場者の目を引いた。カナダのDeep Trekker社が開発した管路点検用ロボットパイプクローラー「PIPE TREKKER(パイプトレッカー)」シリーズ「A-150」と「A-200」を目立つように配置したことがJapanDroneとの大きな違いで、開場早々、このクローラーの説明を求めた来場者がブースに立ち寄っていた。A-150は管径150~600mm、A-200は管径200~900mmに対応する。それぞれHDカメラやパン・チルト・ズーム機能を搭載しているほか、水深50mの耐水圧構造を備えていることが特徴だ。このほかJapanDroneでも話題だった中国CHASING社の最新水中ドローン「CHASING X」がブース正面に展示されて来場者んぼ足を止めていた。8基の大型スラスターを搭載し、どの方向へも移動できる。高精細4Kカメラと12,000ルーメンの高輝度LED照明で鮮明で安定した映像の取得に寄与する。
ブルーイノベーションはコンパクトなブースの中にフライトエリアも設けて屋内空間の点検・測量ドローン「ELIOS 3」と、点検用ペイロード「UT 検査ペイロード」を展示した。AMUSE ONESELFは入口に近い一角に広々としたブーススペースを確保。陸域と浅水域で使えるグリーンレーザースキャナシステム「TDOT 7 GREEN」や、ドローン搭載用レーザースキャンシステム「TDOT」と秒間最大2,400,000パルス、400ラインのリーグル社製「VUX120」を融合したハイエンドレーザースキャナシステム「TDOT 7 NIR-S」、汎用型レーザースキャナシステム「TDOT 7 NIR」のほか、国産エクステンダーで搭載なしの場合に4時間と長時間飛行を可能としたハイブリッドドローン「GLOW.H」などを展示し、多くの来場者が訪れていた。
ジオサーフは高精度な位置情報ソリューションを開発する中国ComNav Technology社のJupiter Laser Visual RTKを中心に展示。Jupiter Laser Visual RTKは最先端のGNSS、IMU、レーザー、デュアルカメラ技術を統合したハイエンドGNSS受信機で、従来到達が困難だった場所や、信号が遮断された場所、危険な場所で没入感ある測量や杭打ち作業が可能になる。
CSPI-EXPOは、前回まで「建設・測量生産性向上展」だったが、今回から「国際 建設・測量展」に名称を変更し、開催目的を建設・測量業界の発展貢献をさらに明確化していた。

スペースワンのブースにはCHASING Xがブースの正面に置かれた 
スペースワン代表取締役の小林康宏さんがブースに置かれた水槽の中に展示している水中ドローンを操作。背景のパネルでパイプクローラー「PIPE TREKKER」が目立つように展示されていることが分かる 
DJI JAPANのブースで来場者に対応していた同社標準化政策ディレクターの浦野靖弘さん 
ひっきりなしに来場者が訪れていたAMUSE ONESELFのブースと冨井天夢さん 
ブルーイノベーションのブース 
ロボティックスジャパンのブースで来場者対応をする佐々木弘之代表取締役 
ジオサーフのブース 
エアロセンスのブース 
テラドローンのブース 
CHCNAVのブース 

CSPI会場には多くの来場者がつめかけ、午前10時の開場にあわせ長い行列がホール内に吸い込まれていった 
ACE-1のブース AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
一般社団法人日本UAS産業振興協議会(JUIDA)は2025年6月24日、陸上自衛隊中部方面隊と災害時応援協定を締結したと発表した。応援エリアをさらに拡大した。
中国地方、四国地方も対象に
JUIDAは中部方面隊の第3師団、第10師団と個別に協定を結んでいた。今回中国地方を管轄する第13旅団、四国地方を管轄する第14旅団も含むことになった。すでに東部方面隊、東北方面隊と提携を結んでいて、応援エリアの拡大を進めている。JUIDAの公式サイトの中で紹介している。
https://uas-japan.org/information/36636/
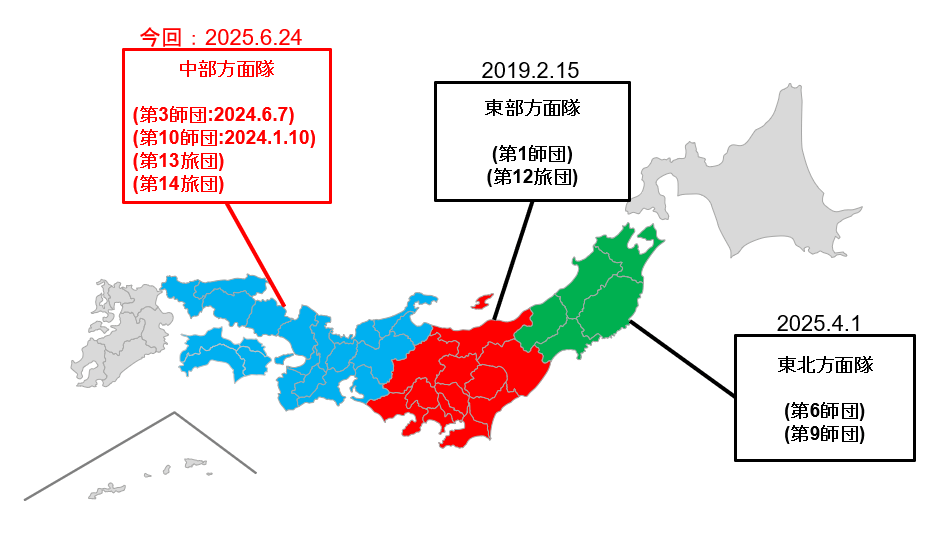
JUIDAの陸自協定エリア 
車両へのドローン積載訓練の参考写真 AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。- 2025.6.25
狭小空間点検用の小型ドローン「IBIS」の開発で知られる株式会社Liberaware(リベラウェア、千葉市)は6月25日、マレーシアのAerodyne Group(エアロダイングループ、Aerodyne Geospatial Sdn. Bhd.)とIBISを運用する人材育成に関わる覚書を交わしたと発表した。東京株式市場では発表を好感し、リベラ株はじりじりと値を上げ、一時、1646円をつけた。なお、覚書締結の時期、人材育成の時期、規模などについては発表では触れていない。
現地訓練機関にカリキュラム構築 将来は海外展開も
発表は6月25日午前11時に行われた。午前10時に1577円で寄り付いていたリベラウェア株は一時1517円まで売られたが、この発表のあと株価はじりじりと値を上げた。
発表によると、リベラウェアはAerodyne Groupの訓練機関「Aerodyne Flight Institute(AFI)でIBISを運用する人材の育成を進める。人材育成はカリキュラム構築、教材の英語対応化、OJT実施などを含む。マレーシアで育成した人材の海外展開も視野に入れるという。
リベラウェアは今回の覚書は「海外市場への事業拡大および収益基盤の多角化を推進するため」と位置付けている。
発表はこちらから。
または以下の通り。
LiberawareとAerodyne Groupが業務提携に関する覚書を締結
~マレーシアにおける高度スキル人材育成プログラムで「IBIS」パイロットを育成~
株式会社Liberaware(千葉県千葉市、代表取締役 閔 弘圭、以下「当社」)は、海外市場への事業拡大および収益基盤の多角化を推進するため、このたびマレーシアを拠点とするAerodyne Geospatial Sdn. Bhd.(所在地:マレーシア・セランゴール州サイバージャヤ、代表者:Kamarul A. Muhamed、以下「Aerodyne Group」)との間で包括的な業務提携に関する覚書(MoU)を締結いたしました。
本提携は当社が経済産業省より採択された「グローバルサウス未来志向型共創等事業費補助金」を通じて実現したものです。ドローンを用いたインフラメンテナンスのデジタルソリューションによる現地完結型エコシステムを構築することを目標とし、Aerodyne Groupの人材育成事業を通じた当社IBISシリーズ(以下、「IBIS」)のパイロット人材育成や、両者の顧客基盤をもとにした実際の現場でのOJT(On-The-Job Training)実施のほか、マレーシアで「IBIS」並びに当社のデジタルソリューションを活用できる高度人材を育成することを目標としています。また、上記を通じて、マレーシア市場での新たな事業機会を創出し、アジア地域全体への展開を視野に入れた協業体制を構築いたします。
■本提携の背景
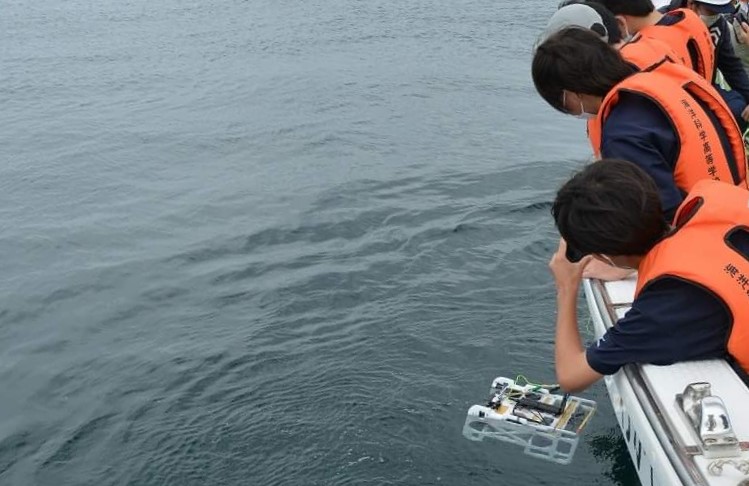
当社は2016年の創業以来、「狭くて、暗くて、危険な」かつ「屋内空間」の点検・計測に特化した世界最小級のドローン開発と運用を行っており、東京電力福島第一原子力発電所の原子炉格納容器内や下水道管路内、JR東日本グループをはじめとする大手企業のインフラ設備において、「IBIS」による点検実績を積み重ね、設備情報のデジタル化・DX推進に貢献してまいりました。
一方、Aerodyne Groupは、2014年の創業以来、Drone Tech、Data Tech、Digital Transformationの3領域を統合した「DT3」モデルに基づくインフラ支援サービスを提供してきました。多種多様なドローンを活用し、AIによるデータ解析と独自プラットフォームによる点検・可視化を通じて、世界45か国以上で事業を展開し、社会インフラの高度化に寄与しています。同社はドローンサービス業界において、2021年より3年連続で世界No.1(Drone Industry Insights調査)に選出されており、人材育成の面でもマレーシア政府と連携した国家的スキームを推進するなど、国際的に高い評価を受けています。
この度、両社の経営資源やノウハウをお互いに活用することで、マレーシアにおける持続可能な人材育成と、その他の海外拠点で、現地完結型ソリューションの提供体制の整備が可能と考え、提携に至りました。
■本提携の目的
本提携は、経済産業省による「グローバルサウス未来志向型共創等事業費補助金」の支援を受けて実施されるもので、マレーシアにおいて当社「IBIS」および関連デジタルソリューションの運用が可能な高度スキル人材の育成を主目的としています。
Aerodyne Groupが運営する訓練機関「Aerodyne Flight Institute(以下、「AFI」)」において、「IBIS」に特化した教育プログラムを新設し、現地での訓練、実フィールドでのOJT、高度人材の育成を通じて、マレーシア国内で業務が完結するエコシステムの構築を目指します。さらに、育成された人材を活用し、両社のグローバルな顧客基盤を活かした海外展開も視野に入れています。
■主な提携内容
今回の業務提携では、以下のような取り組みを共同で進めてまいります。
・AFIへの「IBIS」カリキュラム設置
– 日本国内で運用中の「IBIS」トレーニングセンターをモデルに、同様の機能をマレーシア国内に構築
– 「IBIS」インストラクター資格を有する技術者の育成、トレーニング教材・各種マニュアルの英語化
・顧客フィールドにおけるOJTの実施
– カリキュラムを履修した現地人材に対し、日本の操縦者監修のもと、実環境でのOJTを実施
– 「IBIS」の操作技術に加え、対象プラントや工場設備の基本知識を習得
・育成された高度人材の海外展開支援
– 両社のグローバルネットワークを活用し、育成人材が海外の顧客現場で活躍できる機会を創出
– マレーシアを起点とした人材育成・派遣モデルを他国へも展開可能なスキームへ発展
■ 今後の展開
本提携を通じて、当社は経済産業省の推進する「グローバルサウス未来志向型共創等事業」を、Aerodyne Groupはマレーシア政府の推進する「Shared Prosperity Vision 2030」の目標、特に「マレーシアを高所得国家へ導く新たな人材育成」「第4次産業革命(IR4.0)分野への若年層の参画促進」といった方針を、両社で補完しあいながら両政府の政策を実現してまいります。
また、今回の取り組みを通じて、マレーシアの高度人材を東南アジア地域の諸外国に派遣することで、日本国内のグローバル企業の顧客に対しても、これまで以上に円滑かつ高品質なサービス提供が可能となる体制を構築できることを見込んでいます。
そして、Aerodyne Groupが有する広範な顧客基盤に対して、「IBIS」の有効性を積極的に提案していくことで、短期的にはマレーシア市場での成功事例の創出を図り、中長期的にはそのノウハウを同社の45か国に広がる海外市場へ拡大していくことも想定しております。
なお、本提携の業績に与える影響は軽微ですが、中長期的には両社の技術連携や市場開拓を通じて相互の業績向上に寄与することを期待しています。
▼Aerodyne Groupについて
Aerodyne Groupは、ドローンテクノロジー(Drone Technology)、データテクノロジー(Data Technology)、およびデジタルトランスフォーメーション(Digital Transformation)を融合した「DT3」ソリューションを提供するグローバルリーダー企業です。世界45か国に展開し、リアルタイムのデータ解析、自動化、予知保全を通じて、企業のデジタル変革を支援し、業務の効率化と生産性の最大化を実現しています。ドローン業界における権威ある調査機関であるDrone Industry Insights(ドイツ)が発表する「グローバル・ドローン・サービスプロバイダー・ランキング」では、2021年から3年連続で世界第1位に選出されており、イノベーションとドローン運用面で業界を牽引する存在として高く評価されています。また、Aerodyne Groupは、自社運営のAerodyne Flight Instituteを通じて、マレーシア民間航空局(CAAM)認定のドローンパイロット養成機関としても先進的な取り組みを展開しています。これまでに1,000名を超えるプロフェッショナルドローンパイロットを育成・認定しており、受講者は民間防衛、石油・ガス、法執行機関など多様な業界から集まっています。これにより、同社のトレーニングプログラムが、ミッションクリティカルな分野においても広く信頼されていることが示されています。
会社名:Aerodyne Geospatial Sdn. Bhd.
代表者:Kamarul A. Muhamed
所在地:Persiaran Cyber Point Selatan Cyber 8, 63000, Cyberjaya, Selangor
設立:2014年
事業内容:
・Drone as a Service(DaaS):送電線、通信塔、発電所、建設現場などにおける高頻度・広範囲な点検サービスをドローンで提供。
・インフラDX支援:エネルギー、通信、農業、都市インフラ分野において、ドローンとデジタル技術を組み合わせた統合ソリューションにより、業務の効率化や予知保全を実現。
・Software as a Service(SaaS):DRONOSは、インフラ点検およびアセットインテリジェンスのためのクラウドネイティブかつAI搭載のSaaSプラットフォームです。ドローンによる自律飛行データの処理、AIによる設備や損傷の自動検出、デジタルツインによるレポーティングを可能にし、通信塔や送電線、石油・ガスパイプラインなどの重要設備における現場リスクの低減、点検コストの削減、意思決定の迅速化を支援します。
・人材育成と研修:政府認定のドローンスクール運営事業者(RPTO)として、Aerodyne Flight Instituteを通じ、ドローンパイロットおよび点検スペシャリストの育成・訓練を実施。
▼株式会社Liberawareについて
株式会社Liberawareは、「誰もが安全な社会を作る」をミッションに掲げ、世界でも珍しい「狭くて、暗くて、危険な」かつ「屋内空間」の点検・計測に特化した世界最小級のドローン開発と、当該ドローンで収集した画像データを解析し顧客に提供するインフラ点検・維持管理ソリューションを行っております。弊社は、ビジョンでもある「見えないリスクを可視化する」ことに邁進し続け、人々に安全で平和な社会をお届けします。
会社名:株式会社Liberaware(リベラウェア)
代表者:閔弘圭(ミン・ホンキュ)
所在地:千葉県千葉市中央区中央3-3-1
設立:2016年8月22日
AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -












































- JR東の「ドローンDX CHAMPIONSHIP」が高輪ゲートウェイで開幕 駅そっくりコースをIBIS2が白熱レース
- 山梨県、JAL、大学などとパイロットレスAAMの社会受容性向上で協定
- ブルーイノベーション2日連続ストップ高 ほかのドローン株も大統領令や米中協議進展など好感
- 【JapanDrone2025】過去最大285社で第10回開幕 初公開、新規発表など続々、ダンサーも登場
- 【JapanDrone2025】ブルー、VFRなど4社の国産ポート試作機公開 「2027年の実装、量産化を」
- 【JapanDrone2025】過去最高の来場者を迎え閉幕 前年比8.3%増の23049人
- ACSLが前CEOの「不適切取引」解明の調査委設置を発表 7月めどに報告書
- ダイヤサービス、応急手当の協賛募集 「負傷者の手当てを知っている人を育成する講座の普及を」
- CSPI-EXPO2025、4日間で5万7362人来場 前回比1万人増
- ACSLストップ安 「不適切取引」発表で嫌気売り殺到