- 2024.10.10

防災、事業継続、セキュリティなど危機管理に関連する技術を紹介する「危機管理産業展(RISCON TOKYO)2024」(株式会社東京ビッグサイト主催)、テロ対策技術を紹介する「テロ対策特殊装備展(SEECAT)’24」(東京都主催)、新技術、新製品を御披露目する「エヌプラス(N-Plus)2024」の「特別企画展フライングカーテクノロジー」(エヌプラス実行委員会 、 フライングカーテクノロジー実行委員会主催)が10月9日、東京ビッグサイトで始まった。ドローンやエアモビリティの関連技術、製品も展示され、セミナーなどステージ企画も多くの来場者を集めている。いずれも11月11日まで。SEECATへの入場は完全事前登録制だ。
manisonias下田氏、能登海底調査を報告 中野・慶大SDM顧問、SkyDrive福澤氏、テトラ中井氏も登壇
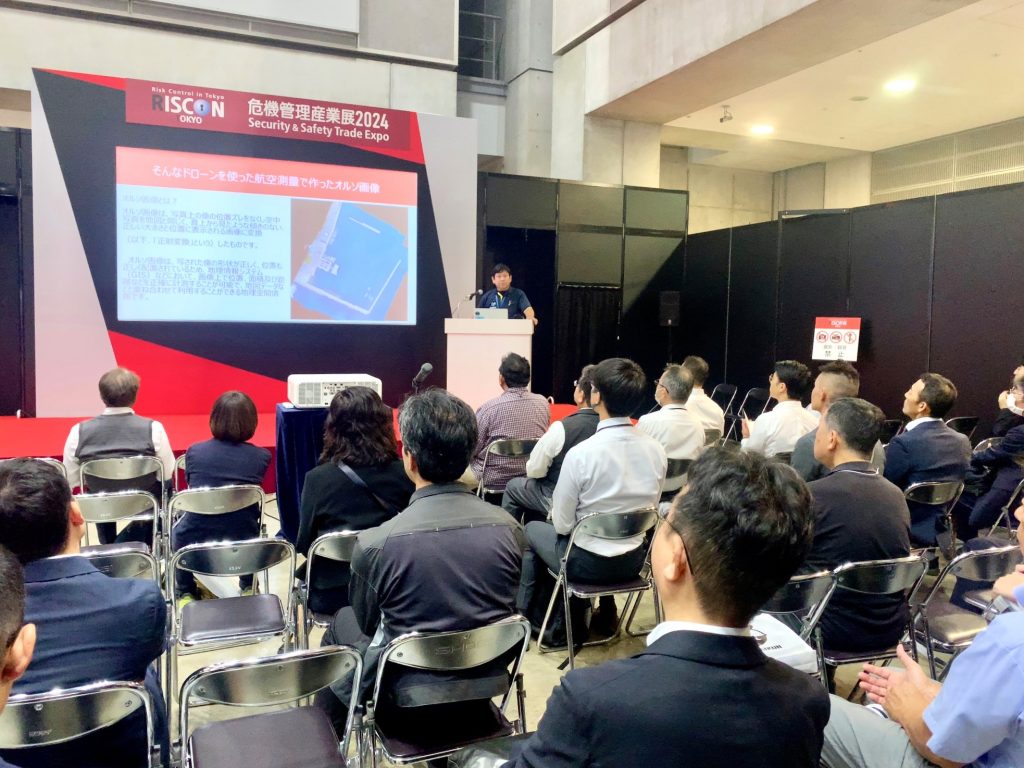
RISCONは危機管理技術のトレードショーで、一般社団法人日本UAS産業振興協議会(JUIDA、東京)、株式会社JDRONE(東京)、株式会社Liberaware(千葉市)など多くの関連事業者が技術を持ち寄っている。ステージ企画でもドローンやエアモビリティ関係の第一人者が登壇し、初日の9日には、株式会社manisoniasの下田亮氏が能登半島地震で被災した沿岸部海底を調査した経緯やそのときに仕様した技術などを紹介した。
下田氏は空のドローン、水中ドローンを使い分けてデータを取得し、それらを組み合わせて地形図を作るなどして、地震による海底被害の調査に取り組んだ。下田氏は「調査した海底では、あるはずの海藻が根こそぎ引きはがされていた。魚などの産卵場所が少なくなっていることが考えられ、調査結果は漁業者が対策を相談するさいの資料になると思う」などと、調査の意義を報告した。また、光が乏しい水中の画像を鮮明化する技術を、同社の海上自衛隊OBが新たに「ivcs」として開発したことも紹介し、この技術を使う前後の画像を比較して示したりした。会場は多くの来場者が詰めかけ、講演を時間より早めに終えたあと会場からの質問も受け付けるなど盛況だった。
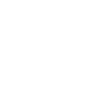
N-Plusの特別企画展フライングカーテクノロジーでも多くの展示、講演が企画され初日から多くの来場者が詰めかけた。
「空飛ぶクルマの現状と課題」を演題にした基調講演では、慶應義塾大学システムデザイン・マネジメント研究科(SDM)顧問の中野冠フライングカーテクノロジー実行委員長がコーディネートし、株式会社SkyDriveの福澤知浩代表取締役CEO、テトラ・アビエーション株式会社の中井佑代表取締役が登壇した。
中野氏は、通説を疑ってみることを提唱し、「空飛ぶクルマ」に関わる騒音、利便性、環境などいくつもの「疑わしい通説」を列挙し盲目的に信じ込むことに警鐘を鳴らした。SkyDriveの福澤氏は開発している機体を大阪・関西万博でフライトさせる目標に向けて活動を続ける中で、「万博では飛行場でもない場所で複数の機体、それも2種どころではない機体が飛ぶことが予定されていて、そうなれば世界で初めてです。商用運航ができないことがニュースで大きく取りあげられていますが、実は世界でも画期的なことをしようとしているのです」と万博での飛行の意義を強調した。テトラの中井氏は「移動時間を短くすることを目指し開発をしている。現在開発中の機体は今年度末に試作機が出来る予定」などと計画が進んでいることを説明した。
10日以降も多くの来場者が見込まれる。

SkyDriveの福澤氏(左)とテトラ・アビエーションの中井氏 
N-Plusの特別企画展フライングカーテクノロジーの展示 
フライングカーテクノロジーの基調講演は立ち見の出るほど 
テトラの中井氏 
慶應義塾SDM顧問中野氏 
RISCONに出展したJDRONEのブース 



講演するmanisoniasの下田氏 
manisoniasのメンバー 

AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
ドローンの普及に取り組む慶應義塾大学は2月23日、神奈川県小田原市の相模湾を望む斜面に広がるミカン農園で、収穫したミカンをドローンでかごごと吊るし、トラックが待機する集荷場所まで運ぶ実証実験を行った。ドローンは着陸せず、上空でホバリングしている間に機体からワイヤーをおろし、地上の作業員がミカンのかごを吊るした。集荷場所でもドローンはホバリングしたままミカンのかごをウインチで下ろした。この間、ドローンは決められたルートを自動飛行した。関係者は今後、環境、機体性能、作業負担など実装に向けた課題と改善点を洗い出す。実験会場となった矢郷農園(小田原市)の矢郷史郎代表は「ドローンには作業負担の軽減を期待して、以前から注目しています。実験を間近で見て、現実味が高まったと感じます」と話した。
ホバリングさせてワイヤーをおろし、地上作業員が積み荷を掛ける
実験の場所は、相模湾から300mほど内陸の丘陵地の斜面に広がる矢郷農園の一角で、農園内にミカンを収穫して積み込むポイントを設けたほか、農地に接する場所にドローンの離発着場所、トラックが待機する集荷場所を設定した。
実験ではドローンは離発着場所を離陸したあと、収穫ポイントに向かって自動飛行。収穫ポイントでは上空でホバリングして静止し、ウインチでフックのついたワイヤーを地上におろした。地上の作業員が、収穫したミカンの入ったかごをワイヤーのフックに掛けると、ウインチ作業員がワイヤーを巻きあげた。一連の荷積み作業が完了すると、かごを吊るしたドローンはトラックの待機する集荷場所まで飛行。ここでも着陸せず、上空でホバリングしたままウインチを使ってかごを下ろし、みかんを届けた。収穫地からトラック待機場所までの距離は約120mで、高低差は約30m。ミカンを積んでから集荷場でおろすまでは、上空での待機時間を含めて数分で修了した。
ドローンが着陸することなく、ホバリングしたままで荷物の積み下ろしをする方法が実用化できれば、ドローンの運用で最も不安定な時間を減らすことができる。また、斜面の多い土地で着陸場所を確保する課題も解消できる。
ミカン農園では通常、作業員が収穫したミカンを足元に置いたコンテナに入れる。コンテナがいっぱいになると作業員は徒歩でトラックまで運ぶ。20㎏ほどのコンテナを運ぶのは重労働で、特に高齢の農業従事者にとって、農業の継続をあきらめる大きな要因になっている。
矢郷農園の矢郷代表によると、農園経営では収穫したミカンのほかにも、イノシシ対策の柵や、苗木など多くの運搬作業が伴う。「広大な敷地を持つ農園では、運搬用のモノレールを敷いているところもあり、みなさんそれぞれに工夫をしているのですが、悩みは尽きません。モノレールは保守、点検が必要ですし、レールが痛んでも車両が傷んでも使えません。レールの場所は一定なので、収穫場所が変わってもそこまで近づいてきてはくれません。ドローンであれば、収穫場所のポイントまで飛行できます。きょうのように着陸せずに運搬できるのであれば、負担軽減につながると思います。ドローンなら移設できない設備と違って貸し借りができます。理想をいえば、作物を収穫した場所から集荷場までの運搬をドローンに任せられればありがたいです。そうなると、農業をやめずに続ける方が増えると思います」と話した。
実験ではこのほか、農地内に収穫ポイントを複数個所設定し、ドローンが自動で集荷場を往復できるかどうかについても確認した。ドローンは最初の収穫ポイントから集荷場所に飛び、そのまま次の収穫ポイントに向かい、再び集荷場所に向かう、といった具合に、設定したルート通りに、設定した複数の収穫ポイントを経由して飛行し、最後は離発着場に帰還した。
実験は、一般財団法人環境優良車普及機構(LEVO)の事業で学校法人、慶應義塾が代表事業者として請け負った。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム(古谷知之代表)が遂行を統括した。また神奈川県が共同事業者に名を連ねた。実験で用いた試験機は徳島大学発のベンチャー、株式会社MMラボ(徳島市)が開発した小型電動ウインチを備えた物流機で、6本のアームを備え、機体の重さはバッテリーを含め9.5㎏。最大ペイロードは24㎏だ。また、RTK・GPS技術はジオサーフ株式会社(東京)が技術を提供し、同社の基地局ユニットを現地に設置した。
実験の全体を指揮した下田亮研究員は、「実験は多くの方の協力があってできます。せっかくの実験ですので、今回の実験から課題の洗い出しや改善を繰り返して、利用者が使いやすい方法を導き出したり、それに適したドローンの開発を進めたりして、ドローン前提社会の実現に近づく取り組みを進めていきたいと思います」と話している。

かごにいれたミカンがドローンで運ばれ、ワイヤーがするするとおりて集荷場まで届けられた 
今回の実験で使われたMMラボ製の機体 
RTK基地局はジオサーフ株式会社が提供した 
ミカン農園に隣接する場所に臨時の管制基地を設営した 
記録用に運搬用とは別の機体も飛行させた。飛行させているのは今回の実験を統括した慶大ドローン社会共創コンソーシアムの下田亮研究員 
ウインチを操作しワイヤーをおろす 
コースの設定。ドローンはこのコースの通りに自動飛行した 
スタッフにドローンの動きを画面で説明 
画面にはドローンの飛行状況が続々と届く 
プログラミングを担当した慶大ドローン社会共創コンソーシアムの研究員でもある三輪昌史徳島大学准教授。機体も提供した 
ウインチ操作でドローンからおりてきたワイヤーにミカンの入ったかごをかける 
相模湾をのぞむミカン農園でドローンが運搬 
実験終了後の記念撮影 AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。





















 SkyDrive、東京で初のデモフライト 飛行中のヘリと音量差が歴然
SkyDrive、東京で初のデモフライト 飛行中のヘリと音量差が歴然  新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築
新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築  NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」
NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」  「JUIDA新年の集い」東京會舘で開催 総選挙公示日と重なり政治家の姿なし
「JUIDA新年の集い」東京會舘で開催 総選挙公示日と重なり政治家の姿なし  SkyDrive福澤代表、特派員協会の会見でコンパクトの優位性アピール 日本製へのこだわりも説明
SkyDrive福澤代表、特派員協会の会見でコンパクトの優位性アピール 日本製へのこだわりも説明  エアロジーラボのG4-S、往復72㎞を無給油で飛行 九州整備局が南海トラフ対策の実験
エアロジーラボのG4-S、往復72㎞を無給油で飛行 九州整備局が南海トラフ対策の実験  ブルーがドーム屋根の漏水箇所特定にドローン活用 ELIOS3が内装側を飛行、外装はMatrice 3TD
ブルーがドーム屋根の漏水箇所特定にドローン活用 ELIOS3が内装側を飛行、外装はMatrice 3TD  音楽とドローンの2026年への期待 2025年には「RED LINE」や「ジ・エンプティ」話題
音楽とドローンの2026年への期待 2025年には「RED LINE」や「ジ・エンプティ」話題