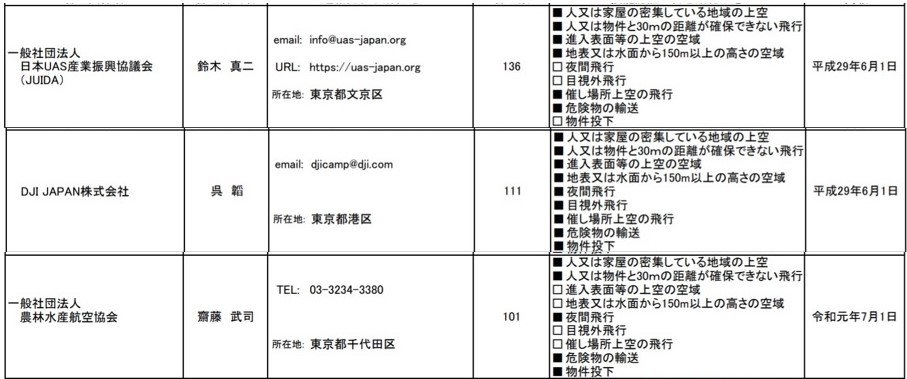
帆船ドローン開発のエバーブルーテクノロジーズ株式会社(東京都調布市)が、水空両用の自律移動機「Type-P」を開発し、実験映像を公開した。最高時速100キロを記録し、着水後は自然風のみで帆走しバッテリー消費を動力機と比べ60分の1に抑えた。
固定翼機と帆船のいいとこどり 目的地付近まで飛行移動し着水して調査などが可能
Type-Pは固定翼機とヨットの特徴を組み合わせて開発された。飛行中はプロペラと固定翼で移動し、着水後は帆を開き、風力で移動する。制御はオープンソースの「Ardupilot」をベースに、飛行制御を「Auduplane」、帆走は「ArduRover」の「Sailオプション」を活用した。自動帆走機構、センサーなどの搭載機構を備えた。
ダム、河川、湖の堆積物、水質、水深などの調査で、岸から距離のある目的地付近までは飛行移動し、調査地付近で着水する利用を想定している。護岸されていない河川、開発はシンガポール国立大学スマートシステム研究所シニアリサーチフェロー末田航氏と共同で、成果は現在、特許出願中という。
動画公開された実証テストはシンガポールで実施。今後、船型の海峡耐用性向上や、大型化、飛行形態との最適化などを追及し、使い勝手のよさを設計に反映させるなどの開発を続けるという。

AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。- 2020.6.16

自動帆走船の開発を手掛けるエバーブルーテクノロジーズ株式会社(東京)は、同社が開発した全長2メートル級のヨット型ドローン実証機「Type-A」などで海上の自動操船、長時間自律航行を実施した。動力は自然風のみで、Type-Aは出発点から複数の経由地をたどり自動で戻る機動性を証明。全長1メートルの実証機は神奈川県の葉山~江ノ島間の海上7キロの自動操船を実施した。同社は新サービスの開発に着手。今後、漁業、観光業などの課題解決を目指す。
環境配慮型の魚群探査、観光への実装目指す
エバーブルーテクノロジーズの実証機 「Type-A」は同社が独自開発した帆船型ドローンで、ソナーを標準装備し、各種IoT機器の搭載が可能。基本設計は、世界的ヨットレース「アメリカズカップ」のレース艇をデザインした金井亮浩氏が手掛けた。また現役カーデザイナーや3Dモデラーが知恵と技術を持ち寄り、自動操船に適した構造を開発した。動力は自然風のみ。電力は通信とセール、ラダーの制御にだけ使う。ただ、緊急時のモーターを補助用に搭載している。さらに操船の制御ソフトウェアにはオープンソースプロジェクト「Ardupilot」をベースに開発した技術を実装した。
Type-Aの実験は3月を中心に神奈川県逗子市の逗子海岸などで行った。実験は、港湾内での移動や着岸を想定し、狭い範囲での小回りなど機動性を確認するマニューバビリティテスト(機動性テスト)が中心。スタート地点から出発すると、海上に設定した2か所のウェイポイントを5メートル以内ににまで接近したうえで通過し、スタート地点にまで戻ってきた。出発から到着まで人が指示を出さない自動航行で、約200メートルをほぼ自然風だけで帆走した。
また同社は2019年から全長1メートルのRCヨットモデルを改造した自動航行実証機の実験も実施している。神奈川県の葉山港~江ノ島の海上7キロメートルを、ウェイポイントを経由したうえで自動航行させることに成功した。
これらの結果をふまえ、同社はサービスの提供に取り組む。魚群探査などの漁業、海洋調査のほか離島、半島の渡船用途を想定し、スマートフォンで利用できる2~6人乗りの海上タクシー開発も進める。エネルギー問題や環境負荷などでの利点も訴えていく方針だ。
エバーブルーテクノロジーズは自動航行ヨットの開発でエネルギー問題を解決することを目指し、2018年12月に操業。神奈川県の葉山、逗子、二宮漁場、ハワイ、シンガポールなどを活動拠点にしている。孫泰蔵氏が代表を務めるMistletoe株式会社(東京)から1億円を調達している。
AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -




















 NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」
NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」  新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築
新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築  下水道の点検から補修まで一体化 埼玉県でNTT東やイードローンなど8者が共同研究
下水道の点検から補修まで一体化 埼玉県でNTT東やイードローンなど8者が共同研究  エアロネクストが回転翼機向け補助翼技術「ActiveWing®」発表
エアロネクストが回転翼機向け補助翼技術「ActiveWing®」発表  「災害伝達の補完に有効」総務省消防庁が報告書 ブルーが検討会の事務局運営
「災害伝達の補完に有効」総務省消防庁が報告書 ブルーが検討会の事務局運営  林野火災対応のブルー、富士山DB、プロドローンにJUIDAが感謝状 ヘリと運航調整しつつ情報収集
林野火災対応のブルー、富士山DB、プロドローンにJUIDAが感謝状 ヘリと運航調整しつつ情報収集  Japan Drone出展者向け説明会開催 民生利用目的を強調「攻撃技術、展示の対象外」
Japan Drone出展者向け説明会開催 民生利用目的を強調「攻撃技術、展示の対象外」