ブルーイノベーション株式会社(東京)が2月21日、工場などの施設内をUGV(自動走行ロボット)の定期的巡回による無人保守・点検サービス「BEP サーベイランス」の提供を正式に提供を始めたと発表した。約2年間の複数施設での現場検証をふまえ、ソリューションとして公開した。
緊急時には遠隔操作でのリアルタイム監視も
ブルーイノベーションが2月21日に発表した内容は以下の通りだ。
ブルーイノベーション株式会社(本社:東京都文京区、代表取締役社長:熊田 貴之)は、発電所(水力、火力、原子力など)や石油化学プラント、工場などのインフラ施設内を自動走行ロボット(Unmanned Ground Vehicle:以下、UGV)が定期的に巡回し、点検・保守業務を効率化・無人化するロボット自動巡回ソリューション「BEP サーベイランス」の正式サービス提供を2月21日より開始します。
「BEP サーベイランス」は、従来の人による巡回点検にかかっていた膨大な時間や手間を減らすだけでなく、作業内容の標準化や点検データの蓄積・定量化による予兆保全に貢献します。また、遠隔からのリアルタイム監視も可能なため、施設状況を即時に把握したい緊急時にも活用可能です。
① 従来、施設内データ収集の多くは、人の巡回による目視と紙による記録で行われており、広大な敷地内の移動や点検項目が多岐にわたるなど膨大な手間と時間を要していました。今回提供する「BEP サーベイランス」は、高画質カメラやサーモカメラ、マイクなど、人の目や耳に代わるデバイスを搭載したUGV が施設内を定期的に自動巡回し、設備状況や計器の数値などのデータ収集を自動で行います。巡回後は充電ポートに帰還するので施設内の無人化に寄与します。
② また、点検結果は手書きされることも多く、作業内容や結果が属人化され、共有や蓄積・分析が難しいといった課題もありましたが、「BEP サーベイランス」では、UGV の経路やデバイスの向きを設定することで、点検対象物を同じ画角・状態でデータ保存します。こうして得られた点検結果はレポート出力も可能なので早期に共有することや、ビッグデータ化することで、設備の予兆保全に貢献します。
③ さらに、設備が遠隔に離れている場合、災害や事故などの緊急時には即座に現場の状況を把握しきれないといったリスクもありましたが、「BEP サーベイランス」では、UGVを緊急巡回させ、デバイスの手動操作することで、遠隔地から施設状況をリアルタイムで把握、情報を共有することが可能です。なお、今回提供を開始する「BEP サーベイランス」は、2022年4月1日よりトライアルサービスを開始しており、複数のインフラ施設での現場検証を経てこの度、ソリューションとして正式提供を開始するものです。
■「BEP サーベイランス」 特長とメリット
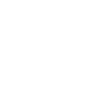
【スケジュール予約】
点検経路・点検開始時間をセットしておくことで予約点検。定期的にセットしておくことで、自動で定期巡回点検します。点検計画に沿って抜け漏れなく点検を実施します。
【自動巡回・データ取得】
施設内の点検対象の場所と経路をセットすることで何度でも同じ経路を自動巡回。巡回プランは複数設定でき、それぞれスケジュール管理が可能です。

【自動充電】
BEP サーベイランスの正式版では新規開発された充電ポートが付属します。4 時間の充電で 4 時間の巡回点検が可能です。巡回点検後、充電ポートに自動で戻るので、現場に行く手間を減らします。

【ネットワーク管理・レポート出力・遠隔操作】
取得した点検データは自動送信され管理アプリで確認可能。データは位置情報とともに閲覧でき、一覧から迷うことなく確認できます。確認した点検結果はレポートとして出力することもできます。また、管理アプリ上ではリアルタイム映像を確認する機能も新規追加しており、緊急時にはデバイスの手動操作も可能です。

【カスタマイズ性】
BEP サーベイランスは、カメラなどのデバイスは現場の状況や環境に応じてカスタマイズが可能です。トライアルサービス提供中に現場の需要に合わせて選択可能なデバイスが増加しています。デバイスのほか、管理画面・レポートの形式なども、お客様のご要望に応じてカスタマイズが可能です。

■「BEPサーベイランス」 導入手順
「BEPサーベイランス」は、現場の条件・要件を整理・検証する初期導入支援からはじまり、お客様ご自身が安心して運用できるよう技術スタッフの安心サポートも提供しております。安全機能も備えておりますが、万が一の事態に備えての保険などもご案内しています。
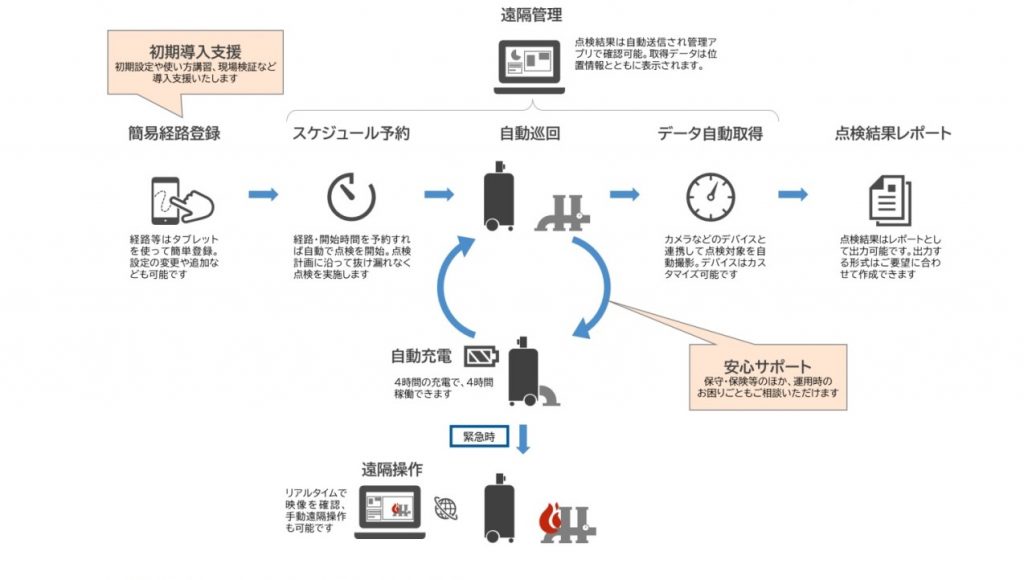
■「BEP サーベイランス」 サービスプラン
「BEP サーベイランス」は、お客様のご要望にあわせて購入プラン・サブスクプランを用意しています。また、どちらのプランでも導入支援として初期設定や講習なども提供しています。

AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
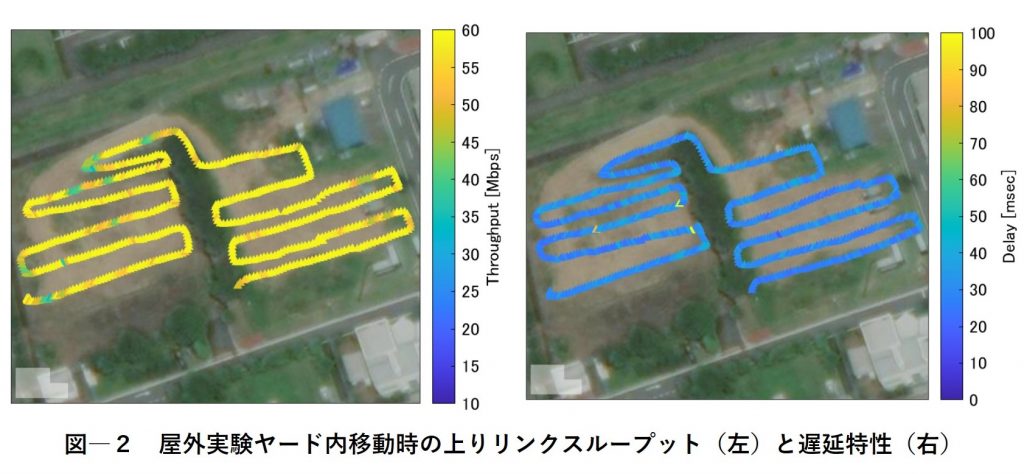
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。株式会社熊谷組、京セラ株式会社、日本電気株式会社(NEC)が、ローカル5G(第5世代移動通信)を活用した不整地運搬車の自動運転実権を実施した。茨城県つくば市の熊谷組技術研究所「本館」、「土質実験棟」にNEC製ローカル5G基地局を設置し、京セラ製ローカル5G対応デバイス「K5G-C-100A」を設置した建設機械を用いた。実験では「屋外実験ヤード内」での高い上りリンクスループット、低遅延を達成可能なことを確認したという。無人化施工は災害時の復旧作業での二次災害防止対策などで必要性が高まっている。
熊谷組技術研究所でNEC製L5G基地局や京セラ製デバイス「K5G-C-100A」搭載建機活用
無人化施工には、映像の高品質化、現場の建機の傾き、振動の大きさなど状況のフィードバック、低遅延伝送が求められている。実験は、ローカル5G環境下での可能性を探るのが目的で、8月22日の発表によると3社は今後も、この通信環境にさまざまなシステムを組み込んで検証実験を継続すると話している。
実験が行われたのは6月。つくば市の熊谷組技術研究所の「本館」「土質実験棟」にNEC製ローカル5G基地局を設置。アンテナを「屋外実験ヤード」に向けて調整するなどして、L5Gのシステムを構築した。自動運転の車両には京セラ製ローカル5G対応デバイス「K5G-C-100A」を設置した建設機械を使った。実験により「屋外実験ヤード内」での高い上りリンクスループット、低遅延を達成可能なことを確認したという。
発表は以下の通り
ローカル5Gを活用した無人化施工の実証実験を開始 技術研究所屋外実験ヤードでの遠隔操作と自動運転を実施
株式会社熊谷組(代表取締役社長 櫻野 泰則)、京セラ株式会社(本社:京都府京都市、代表取締役社長 谷本 秀夫、以下 京セラ)、日本電気株式会社(本社:東京都港区、代表取締役 執行役員社長 兼 CEO:森田 隆之、以下 NEC)は、熊谷組技術研究所屋外実験ヤードにおいて、無人化施工に不整地運搬車の自動運転を組み込んだローカル5G(第5世代移動通信)の試験環境下で建機の遠隔操作と自動運転の実証実験を6月に実施しました。今後は、継続して本通信環境に様々なシステムを組み込んで検証実験を継続していきます。
1.目的
近年、調査、測量から設計、施工等すべての建設プロセスにおいてICT技術を活用する「i-Construction」に関する取り組みが進んでおり、災害補修時における二次災害予防のための無人化施工技術に注目が集まっています。無人化施工技術の高度化のためには、4Kによる車載カメラ映像の高品質化や、建機の傾きや振動等の現場情報のフィードバックが必要であり、従来よりも高速で低遅延な伝送が可能な無線通信システムの適用が必要となります。地域や産業の個別ニーズに応じて地域の企業や自治体などの様々な主体が構築可能なローカル5G(L5G)に注目し、屋外実験ヤードにおいてL5Gのシステム構築をし、実証実験を実施しました。加えて、ヤード内を移動する建機の位置と通信速度の情報を組み合わせることで、通信状況を視覚化する方法を確認しました。
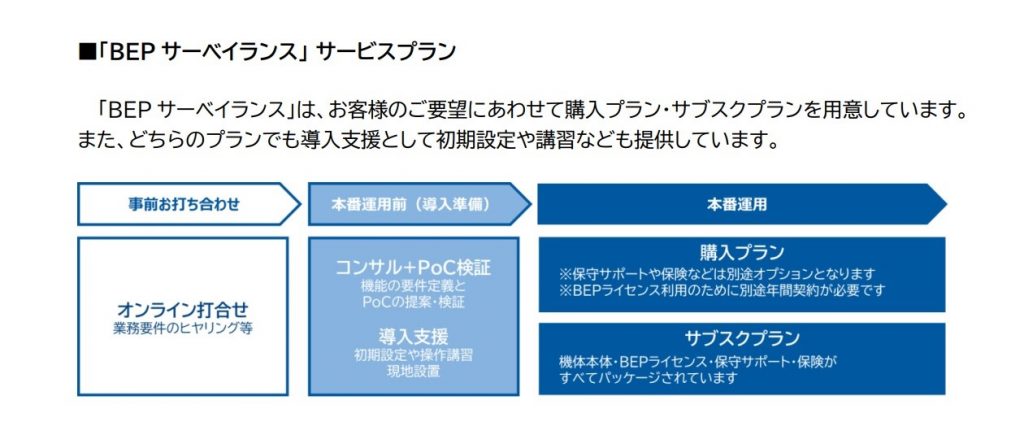
2.システム基本構成
技術研究所の本館、及び土質実験棟にNEC製ローカル5G基地局を設置し、アンテナを屋外実験ヤードに向けて調整しました(写真―1)。基地局ユニットから土質実験棟内のサーバを経由して遠隔操作室の通信機器まで回線接続が行われております。建設機械上には受信電力情報をリアルタイムで取得できる等の運用自由度の高い京セラ製ローカル5G対応デバイス「K5G-C-100A」を設置しており(写真―2)、車載カメラの映像をIP(インターネットプロトコル)ネットワークの上り回線を通じてパケット伝送を行い、遠隔操作室のモニタに表示することが可能となります(写真―3)。また、基本構成図は以下となります(図―1)。写真3点
図ー1 基本構成図 
写真―1 屋外実験ヤード内へ向けられたNEC製ローカル5G基地局とアンテナ 
写真―2 京セラ製ローカル5G対応デバイス「K5G-C-100A」(ドーム状のボックスに格納)を搭載した建設機械 
写真―3 ローカル5Gでのパケット通信を利用した建設機械の遠隔操作の様子 3.実証実験
屋外実験ヤード内でのスループットや遅延時間測定に関する基礎実験を実施し、基地局間のハンドオーバー機能(移動端末接続する基地局のスイッチ機能)を通じて、屋外実験ヤード内での高い上りリンクスループット、低遅延を達成可能なことを確認しました(図―2)。
4.今後の展開
複数の建設機械にローカル5G対応デバイス(京セラ製「K5G-C-100A」)を接続し、遠隔操作を実施する際の操作性を調査し、現場環境での実験試験運用を行う予定です。免許による周波数帯域の占有可能な特徴を活かし、他端末からの帯域内干渉が発生しやすい無線LANとの特徴の差異を把握しつつ、複数の無線通信システムを併用しながら、建機の遠隔操作と自動走行を高度化することが可能なローカル5Gの本番導入に向けた取り組みを加速いたします。
AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。






















 JR東の「ドローンDX CHAMPIONSHIP」が高輪ゲートウェイで開幕 駅そっくりコースをIBIS2が白熱レース
JR東の「ドローンDX CHAMPIONSHIP」が高輪ゲートウェイで開幕 駅そっくりコースをIBIS2が白熱レース  ブルーイノベーション2日連続ストップ高 ほかのドローン株も大統領令や米中協議進展など好感
ブルーイノベーション2日連続ストップ高 ほかのドローン株も大統領令や米中協議進展など好感  ACSLが前CEOの「不適切取引」解明の調査委設置を発表 7月めどに報告書
ACSLが前CEOの「不適切取引」解明の調査委設置を発表 7月めどに報告書  ACSLストップ安 「不適切取引」発表で嫌気売り殺到
ACSLストップ安 「不適切取引」発表で嫌気売り殺到  【JapanDrone2025】過去最高の来場者を迎え閉幕 前年比8.3%増の23049人
【JapanDrone2025】過去最高の来場者を迎え閉幕 前年比8.3%増の23049人  ダイヤサービス、応急手当の協賛募集 「負傷者の手当てを知っている人を育成する講座の普及を」
ダイヤサービス、応急手当の協賛募集 「負傷者の手当てを知っている人を育成する講座の普及を」  米ジョビー、ドバイでエアタクシー試験飛行 2026年に「最初の乗客を」
米ジョビー、ドバイでエアタクシー試験飛行 2026年に「最初の乗客を」  CSPI-EXPO2025、4日間で5万7362人来場 前回比1万人増
CSPI-EXPO2025、4日間で5万7362人来場 前回比1万人増  ドローンで法面緑化 東興ジオテックとエアロセンスが「グリーンインパルス」工法開発
ドローンで法面緑化 東興ジオテックとエアロセンスが「グリーンインパルス」工法開発  JUAVが社会実装拡大をテーマの研究会を6月25日に開催
JUAVが社会実装拡大をテーマの研究会を6月25日に開催