- 2026.2.16
海外勢に押され気味のドローンについて、日本国内の産業基盤を強化する取り組みに政府が本格的に動き始めた。経済産業省は日本国内での安定供給の確保を図るための「取組方針(案)」を策定し、現在パブリックコメントを受け付けている。システムを構成するモータ、フライトコントローラ、バッテリなどについては、「汎用品の転用が困難な中、特定国が大きなシェアを有し、海外では供給途絶の事例も」と警鐘を鳴らしており、強い危機感が伝わる。日本のドローン産業の見直し機運が高まってきた。
登録45万台なのに国内生産は2023年時点で年間約1000台
経産省の「取組方針(案)」はポータルサイト「e-GOV」の「無人航空機に係る安定供給確保を図るための取組方針(案)についての意見募集について」で確認できる。「経済施策を一体的に講ずることによる安全保障の確保の推進に関する法律第8条第1項」(経済安全保障推進法)に基づき、1月30日に公表され、2月28日9時59分まで意見を募集している。取組方針は表紙を含め24ページで、取組の基本方向、取組の施策、取組内容と期間または期限、支援業務と支援業務独立法人基金など7章で構成される。
ドローン(取組方針では「無人航空機」と表現)については「経済安全保障の観点から極めて重要なインフラ」で「安定供給の確保が求められる」と明記。一方、日本のメーカーが製造した完成機体も、バッテリ、モータ及びESC、フライトコントローラ、映像伝送モジュールは「特定国の部品メーカーから調達している例が複数確認」されていて、「他国に供給を依存している状況と考えられる」と分析している。
日本国内では45万台が登録される中、機体生産台数は2023年時点で年間1000台程度との推計値を表示し、「海外も含めて、特定国の部品サプライヤーから調達していて、完成機体、部品のいずれにおいても、国際的に特定少数の供給源に依存」と高い外部依存性を指摘。海外の輸出管理強化により「供給途絶リスクが高まっている状況」と警鐘を鳴らしている。
このため国内で安定供給を確保する必要があり、具体的に国内で生産基盤を整備し、自律性を高める必要性があると言及。従来の政府による支援対象が機体関連の研究開発にとどまることをふまえ、生産基盤整備が十分に進んでいないと断定し、法に基づく支援により他の取組とあわせて一体的に安定供給を図る必要がある、と結論づけている。
ドローンのサプライチェーンについては、複数の機能別構成部品と、それらを構成する汎用素材で成り立つと外観し、主な構成部品や汎用素材を列挙したうえで、途絶リスクの観点から、モータ及びESC、バッテリについては、ドローン特有の仕様が求められ、汎用品の転用が困難であるにも関わらず、「特定国」が大きなシェアを持ち、海外ではすでに供給途絶の事例が発生していると事例を紹介している。また映像伝送モジュール、フライトコントローラも、安定飛行、情報セキュリティ確保の観点からきわめて重要で「技術的に自律性を確保するため、国内で安定的な技術基盤及び供給基盤を確保することが極めて重要」と明示。これらから、バッテリ、モータ及びESC、フライトコントローラ、映像伝送モジュールを「重要な役割を果たし、これらの安定供給を確保することで我が国のサプライチェーン強靭化につながると考えられる」とまとめている。
なお、バッテリ、モータ及びESC、フライトコントローラ、映像伝送モジュールについて、「現在代替品が存在しておらず、多用途からの転用も困難」と指摘。これらの供給が途絶すると、ドローンの製造が停止するなど安定供給に重大な影響を及ぼし得ると危機感を表明している。
さらにドローンの量産基盤構築のうえでは、重要部品の効率的な生産を促す規格化、標準化、安全な利用を担保するための情報セキュリティ確保を進めることも併記。競争力ある機体については、飛行性能は現在高いシェアを持つ機体と同水準の性能を実現するための研究開発を進め、同時に防水・防塵性、閉所飛行などの性能で付加価値を強化することなどで市場での競争優位性を確立することに言及している。効率生産については、機体ごとの開発の非効率性について触れたうえで、「産業全体で重要部品の規格化・標準化を進め、一定の量産規格を確保する」と強調している。さらに情報セキュリティは、情報が窃取された場合の公共安全や秩序維持に生じるおそれのある支障に言及し、「適切な対策を講ずること」を求めている。
2030年に8万台の産業基盤、年産1万台体制
「取組方針(案)」は、これらの「特定国」依存体質の改善で、2030年時点で約8万台の基盤を構築することを目標に掲げている。同時にそのための措置を講じなかった場合には、日本の供給能力の喪失、公共安全分野で情報セキュリティリスクのある機体が利用されるおそれがあり、「早急に対応する必要がある」と指摘している。
この認識をベースに、政府は供給確保計画を支援することになる。まず計画の認定要件を定め、ここには条件を満たした機体開発と、バッテリ、モータ及びESC、フライトコントローラ、映像伝送モジュールが対象品目に記されている。支援対象の取組は、生産ライン増強、生産能力強化などとそのための研究開発が柱だ。安定供給確保の目標である、2030年時点での8万台生産基盤構築については、2030年時点で完成機体の生産台数が年間で1万台以上となる体制のための取組であることが明記されている。
このほか取組方針(案)には、期限、実施体制、技術流出防止措置などについて整理している。また制度運用の業務を行う法人としてNEDO(国立研究開発法人 新エネルギー・産業技術総合開発機構)を選定している。
ドローンは、政府が2022年に成立した経済安全保障推進法の「特定重点物資」に、2025年12月に追加指定した。半導体、蓄電池、重要鉱物などと並び、サプライチェーンの強靭化の柱に位置付けられた形だ。今後、これらの生産を担う産業や、生産した製品を運用する事業者、その事業の成果を享受する幅広い産業、娯楽などの領域が、ドローンのサプライチェーン構築の動きを見守り、発言し、応援することになる。
国内登録45万台という市場規模を抱えながら、完成機の国内生産は年間1000台規模にとどまるという現状は、産業政策の課題にとどまらず、安全保障、災害対応、公共安全維持を含めたインフラとしてのドローンを、他国依存のままでよいかをつきつけている。パブリックコメントの募集は、産業にとって行政手続きを超えて、供給網の構築に参画する意思を示す機会でもあると考えられる。声を上げられる期間は2月28日までだ。
TAG
AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2022.4.5

ドローン開発の株式会社ACSL(東京都江戸川区)は3月30日、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の事業として開発した情報漏洩対策ドローンに搭載したフライトコントローラーなどの技術を、株式会社石川エナジ―リサーチ(群馬県太田市)が開発した点検ドローン「ビルドフライヤー」に統合することに成功したと発表した。両者の共同事業で、ACSLがNEDO事業で開発した技術を転用した事例の第一号になる。今後、NEDO事業で開発した高セキュリティー技術の普及にはずみがつきそうだ。
統合第1号は超軽量高剛性の「ビルドフライヤー」
石川エナジーリサーチの「ビルドフライヤー」に統合が成功した技術は、NEDOの「安全安心なドローン基盤技術開発」事業のもとで開発が進められた高セキュリティードローンに採用されたフライトコントローラーとGCSだ。データの漏洩、抜き取りの防止、機体の乗っ取りへの耐性強化を実現させた高性能小型ドローン「SOTEN(蒼天)」に搭載された。
ACSLはNEDO事業で、フライトコントローラーなどの標準基盤設計と開発を担った。開発の成果として「SOTEN」を発表したのは2021年12月で、あわせてフライトコントローラーのAPI(アプリケーション・プログラミング・インターフェース)や、主要部品の接続仕様もコーポレートサイトで公開した。
石川エナジ―リサーチとACSLは、公開されたAPIをもとに、「ビルドフライヤー」にフライトコントローラーとGCSの統合に取り掛かり、実証を重ねた末に成功させた。
石川エナジーのビルドフライヤーは、5㎏までのカメラ、測量機器などの搭載が可能な空撮、点検、測量対応の4本アームのマルチコプターで、5㎏の機材を積載し30分の飛行可能な、本体にマグネシウムを使った超軽量、高剛性の機体だ。NEDO開発事業の技術が統合された機体の現場投入が期待される。
NEDO事業技術の転用第1号を足掛かりに、今後、高セキュリティードローンへの採用が加速する可能性がある。ACSLも今後、公開したフライトコントローラーのAPIの周知、普及に力を入れる方針だ。
石川エナジーリサーチのビルドフライヤー 
TAG
AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2020.10.13

ロボット開発支援を手掛ける株式会社アトラックラボ(埼玉県三芳町、伊豆智幸代表取締役)は、ドローンの国産化に必要な技術のサポートサービスを開始したと発表した。利用者が持つドローンに海外製フライトコントローラーが搭載されている場合に、それをオープンソースでカスタマイズすることなどを念頭に置いており、伊豆智幸代表は、「大掛かりな開発ではなく、使いやすくしたい人や、実用機を自作したい人の手助けをしたい」と説明している。
ArduPilot系「The Cube」活用し独自カスタマイズも 伊豆氏「使い方支援に近い」
アトラックが開始した想定している開発支援サービスは、ドローンの開発で敷居が高いとされるフライトコントローラーやコンパニオンコンピューターなどが中心になると想定している。サービスではArduPilot系で、採用実績も多い「The Cube」(Pixhawkオートパイロットの進化版)を使うことで、相談者の海外製ドローンなどのカスタマイズ需要や独自開発の相談に応じる。「The Cube」は、台湾と米国で生産されているが、オープンソースのため日本で独自ハードを製作したりカスタマイズしたりすることが可能だ。
支援には、フライトコントローラーの使用方法の伝授、コントロールソフトウエアのカスタマイズ、AI処理を行うコンパニオンコンピューターの接続、開発支援を含む。ほかにもフレームの設計支援、カーボンやアルミ部品の製造支援、モーターやESC(モータードライバー)の選定、調達など、ドローンを組み上げるのに必要な支援も行う。
また、アトラックラボで設計・製造した、汎用フレームの部品供給も行っており、様々なアプリケーションに対応する独自ドローンが作れる。
今後は、各地のパートナーと、運用やトレーニングを企画し、国産ドローンの開発・運用を支援する方針という。
伊豆代表は「使いたい、使いやすいドローンにする、作る、という意味では、“開発支援”ではありますが、“使い方支援”に近いかもしれません。フライトコントローラーは、オープンソースでカスタマイズしようとしても、パラメータが多く、何から始めたらいいのかがわかあらないという声を多く聞きます。実際、オープンソースには日本語の説明もなく、日本人にはわかりにくい面はありますのでそんなところもサポートしたい」と話している。
想定しているのは大掛かりな開発よりも「ゆるく作りたい人のサポート」という。「たとえば農業従事者であれば、散布のためのドローンを自分でつくりたいとか、粒剤をまくためのアタッチメントを取り付けたい、といったケースなどを考えています」(伊豆代表)。
さらに、「ロボット、という話題になると、他人ごとになってしまう傾向が多いのではないかと思っています。大企業や大資本でないとできないこともありますが、実はそればかりではないし、それほど手をかけなくてもできることがあります。マニュアルで飛ばすとか、簡単なミッションで飛ばすといったことなら大掛かりなことではなく、身近でできる。そんな成功体験を味わってほしいとも思っています」と話している。
アトラックラボのメールアドレス:sales@attraclab.com
アトラックラボのホームページ:http://attraclab.com
「The Cube」(左)などを活用することを念頭に置いて開発支援サービスをはじめたアトラックラボの伊豆智幸代代表取締役(右下) AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2020.8.11
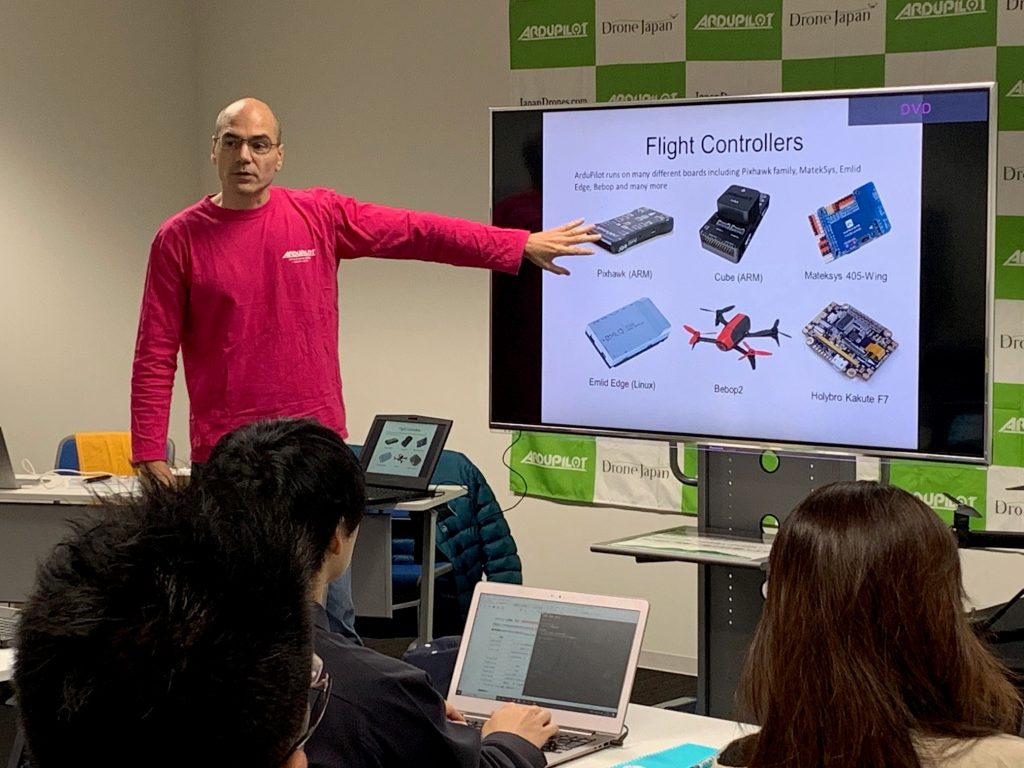
オープンソースのフライトコントローラーで日本のドローン産業を支える人材を育成しているドローンエンジニア養成塾。発表会レポートの最終回は、前回の6組に続き、塾長を務めるJapanDrones株式会社(長野県)のRandy Mackay代表のプレゼンテーションを含めた5組の発表とデモフライトを紹介する。(田中亘)
■捜索・点検用 親子ドローン
前回の②までに6組の発表をお伝えした。
続く7組目の藤川秀行氏による「捜索・点検用 親子ドローン」は、2台のドローンを組み合わせた探索への取り組みだ。
飛行中の5インチArduCopter(親機)からFPVマイクロドローン(子機)が飛び出し、被災家屋やプラント内部などの狭所を飛行する。2台を連携させることで、小型ドローンのバッテリーを節約し飛行エリアを拡大する。
藤川氏は「高所、低所、被災地など、人が近づけない場所からの飛行を可能にする」と説明する。開発における今後の課題としては、親機から飛び立った子機の回収、子機から伝送される映像の高画質化、中継機器の搭載、子機のオートパイロットなどがある。
親子ドローンが切り離されて飛ぶ仕組みを解説する藤川秀行さん 屋外でのデモンストレーションでは、親機のパラメータ設定のトラブルなどで、残念ながら子機が離陸する様子は確認できなかったが、YouTubeには成功した動画が収められている。
■ArduPlaneによるVTOL機製作
8組目の松本威氏は、市販機での「ArduPlaneによるVTOL機製作」について発表した。
松本氏の製作したVTOL機は、市販機を改造したもの。狭い場所での離着陸と長距離飛行を両立させるVTOL機は、北海道で開催されている遭難者を探索するコンテストでの優勝を狙っている。松本氏は「市販のWingcopterのようなVTOL機は、約1千万円します。しかし、このArduPlaneによるVTOL機では、10万円で製作できます」とメリットを訴える。
デモ飛行の動画を紹介する松本威さん 直前のテスト飛行のさいにモーターが破損して煙を吹いてしまったことから、デモフライトは中止されたが、コスト面での利点は参加者に強烈な印象を残した。

開発中のVTOL機 ■OpenCVによる自動追尾オムニローバー
9組目の山田義久氏は「OpenCVによる自動追尾オムニローバー」を発表した。
同ローバーは、前後の駆動輪をギヤボックスで連動し、右側または左側のモータを制御することで、オムニローバーのような動きを実現する。
4つのタイヤで移動するローバーでは、主に2つの制御方法がある。ひとつは、後輪に駆動用のモーターを、前輪にステアリング用のモーターを取り付けて、ラジコンカーのように前後に移動中にステアリングを操作して左右に方向を変える方法。もうひとつは、左右のタイヤに独立したモーターを取り付けて、移動と回転を同時に行うスキッドステアリングという技術。キャタピラで移動する重機などが、スキッドステアリングに近い。
山田氏はモーターコントローラのポート数の関係から、2つのモーターで4輪ローバーを制御するために、前後の車輪を連動させた。
オミニローバーの仕組みや搭載b品について解説する山田義久さん MissionPlannerでプログラムされたコースを自動走行する計画をたてていたが、当日の会場では人工芝の摩擦抵抗が大きすぎて、オムニローバーは思うように前進できなかった。そこで、山田氏は、本体を手に持って、スキッドステアリングの動きに合わせて走り回り、コーナーでタイヤの回転が変化する様子を体現してみせた。

ローバーを手に持って走る山田義久さん。体を張って動きを再現した ■ドローンキットプログラムによる「同時自動・陸海空ドローン」
10組目の我田友史氏は、「ドローンキットプログラムによる『同時自動・陸海空ドローン』を紹介した。
我田氏は、マルチコプターとローバーをドローンキットプログラムにより、2台同時に制御するデモンストレーションを開発した。開発には、Pythonというスクリプト言語を利用し、2つのタイプが異なるドローンを同じコマンドで制御できるようにした。
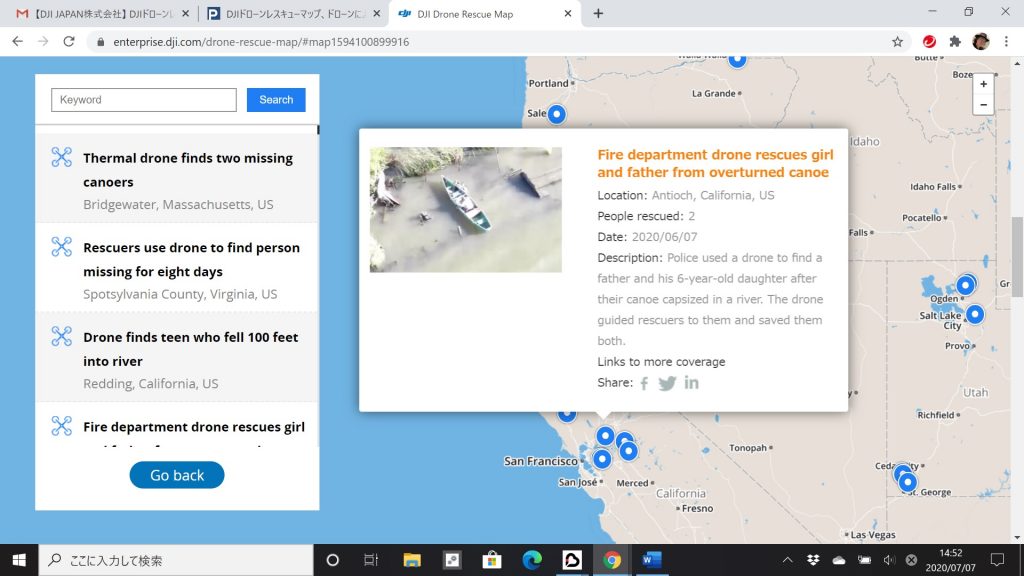
2台のドローンを同時に制御できるメリットとして我田氏は「例えば、捜索などを想定したときに、ドローンで上空から海の遭難者を発見し、その位置情報を元に水上ドローンが救助に向かうという複合案が考えられます」と話す。その他にも、マルチコプターと水上ドローンとローバーを組み合わせて、テトラポットや堤防などの入り組んだ地形を複合的に捜索するアイディアも紹介された。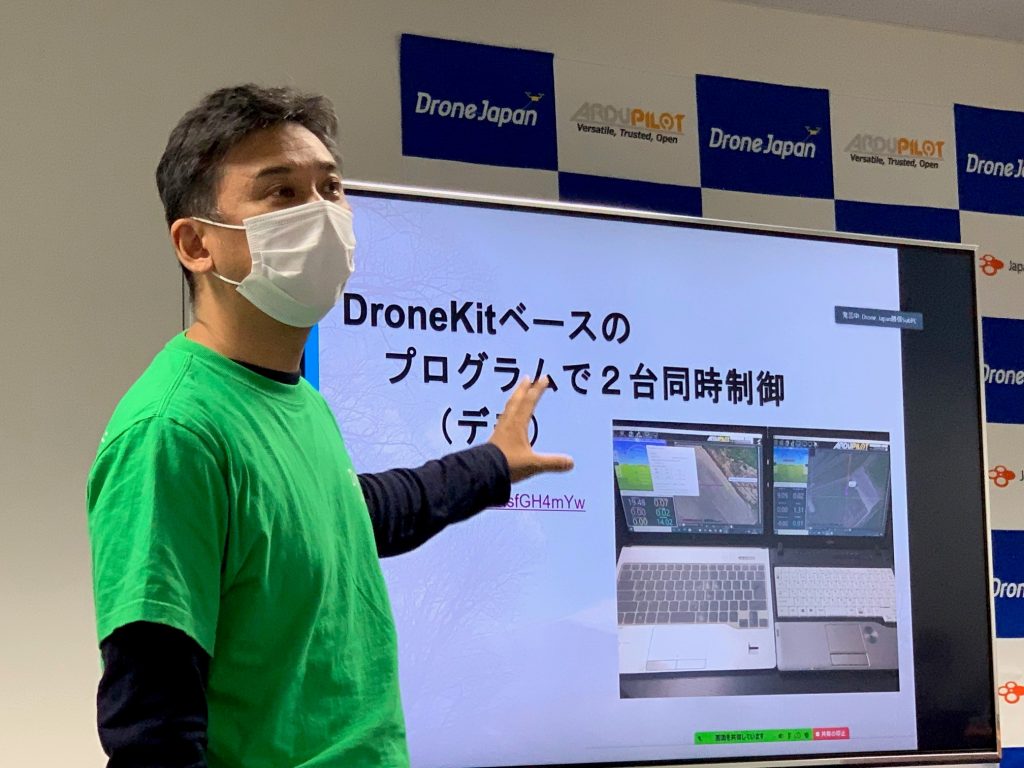
陸海空の活用例を説明する我田友史さん デモンストレーションでは、最初にマルチコプターがオートパイロットで飛行して、着陸した位置のデータが送信されると、その位置を目指してローバーが自動制御で走る予定だった。しかし、用意していたローバーにトラブルが発生し、動かないという物理的な問題に突き当たった。
そこで、4組目に登壇した高山氏の「ArduRover 無人自動散水車両」がピンチヒッターとして登場。同じ制御システムでオートパイロットが可能「な「ArduRover 無人自動散水車両」は、期待に応えて代打の役割を果たし、マルチコプターが着陸した地点に正確に移動してみせた。
トラブルの発生したローバーにかわり、高山誠一さんのArduRover無人自動散水車が緊急登板 
マルチコプターの着陸場所まで自動走行。見事な連携プレーを披露した ■デモンストレーションの大トリは塾長のローバーとマルチコプター
発表会の最後は、Randy Mackay塾長による2つのデモンストレーションが紹介された。ひとつめは、ローバーによる衝突回避システム。ローバーの前方に取り付けたカメラの映像をリアルタイムに解析して、障害物を検知してプログラムされたルートを自動で回避する。
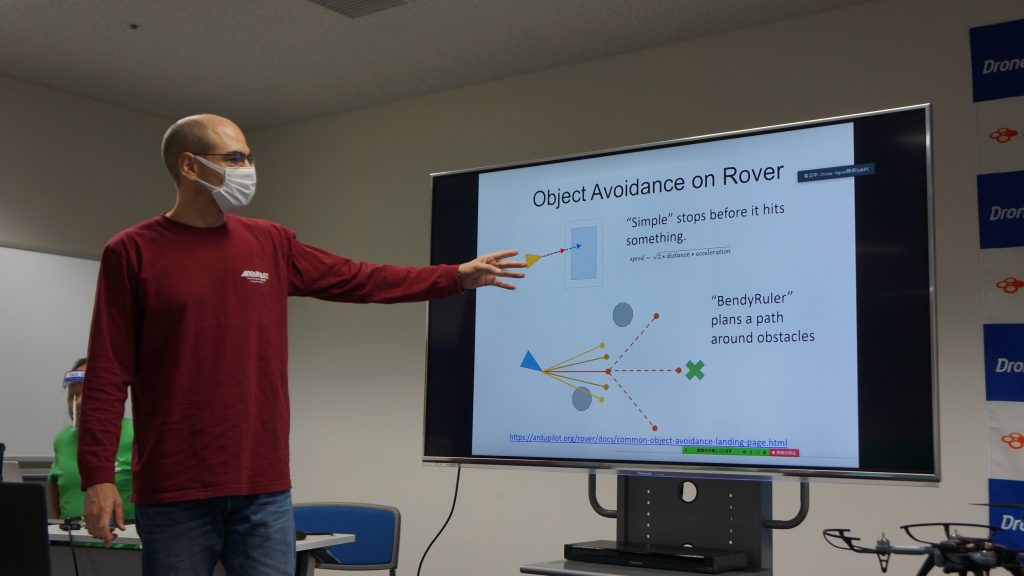

障害物を検知するカメラが取り付けられたローバー デモンストレーションの会場では、次々と前方に立ちはだかる人物を検知して、停止か回避の行動をとっていた。

障害物を検知して停止するローバー 
たちはだかる障害物(笑) もうひとつのデモンストレーションは、T265センサーを使って、非GPS環境下で周辺の障害物などを認識しながら飛行することを想定した。塾長はT265が屋内環境で物質のエッジなどを捉えて認識するため、光量が強く目立った構造物のない屋外では、正確に周囲を認識できない恐れがあると分析。屋外で検証したところ、事前の分析通り、マルチコプターは安定した飛行を示さなかった。
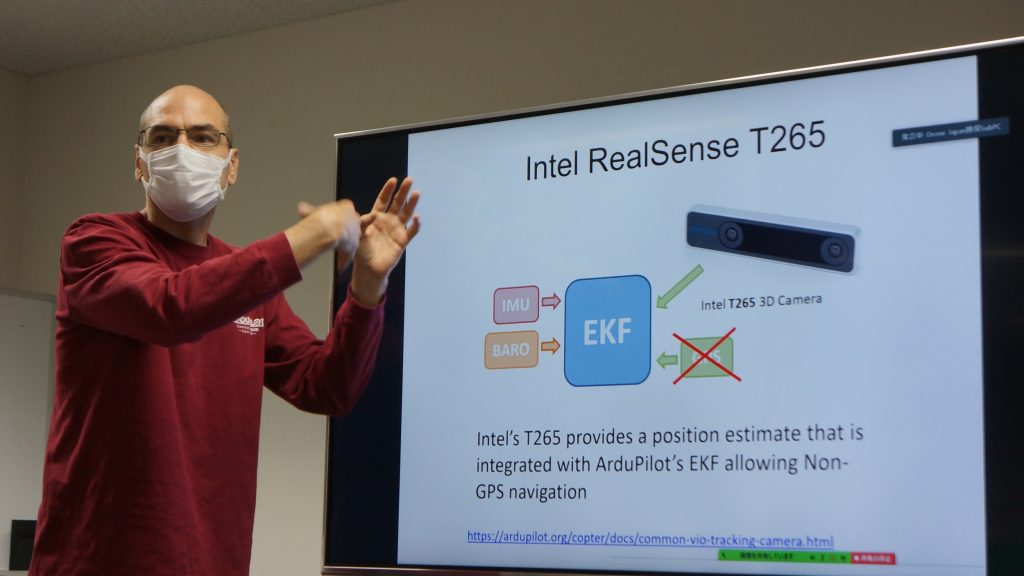
3Dセンサーで非GPS環境下での飛行を制御する仕組み説明するRandy Mackay塾長 
3Dセンサーを搭載したドローン デモンストレーションは仮説通りの動作を示したものや、仮設通りには動作しない要因を発見する機会になったものなど、多くの成果をあげた。塾長と塾生は、今後も日本のドローン産業や技術を盛り上げていくために、新たな研究や開発に取り組んでいく。

日本で実力をつけてきた「ドローンエンジニア養成塾成果発表」レポート①
日本で実力をつける「ドローンエンジニア養成塾成果発表」レポート②
日本で実力をつけていく「ドローンエンジニア養成塾成果発表」レポート③AUTHER
 田中 亘
田中 亘 -

































 NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」
NTT東のドローン、eスポーツ学校など多彩な事業紹介 「地域ミライ共創フォーラム2026」  新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築
新会社「GMO Preferred Security」設立発表 イエラエとPreferredが合弁、国産AI環境構築  下水道の点検から補修まで一体化 埼玉県でNTT東やイードローンなど8者が共同研究
下水道の点検から補修まで一体化 埼玉県でNTT東やイードローンなど8者が共同研究  エアロネクストが回転翼機向け補助翼技術「ActiveWing®」発表
エアロネクストが回転翼機向け補助翼技術「ActiveWing®」発表  「災害伝達の補完に有効」総務省消防庁が報告書 ブルーが検討会の事務局運営
「災害伝達の補完に有効」総務省消防庁が報告書 ブルーが検討会の事務局運営  林野火災対応のブルー、富士山DB、プロドローンにJUIDAが感謝状 ヘリと運航調整しつつ情報収集
林野火災対応のブルー、富士山DB、プロドローンにJUIDAが感謝状 ヘリと運航調整しつつ情報収集  Japan Drone出展者向け説明会開催 民生利用目的を強調「攻撃技術、展示の対象外」
Japan Drone出展者向け説明会開催 民生利用目的を強調「攻撃技術、展示の対象外」