- 2020.8.11
日本で実力をつけていく「ドローンエンジニア養成塾成果発表」レポート③
オープンソースのフライトコントローラーで日本のドローン産業を支える人材を育成しているドローンエンジニア養成塾。発表会レポートの最終回は、前回の6組に続き、塾長を務めるJapanDrones株式会社(長野県)のRandy Mackay代表のプレゼンテーションを含めた5組の発表とデモフライトを紹介する。(田中亘)
■捜索・点検用 親子ドローン
前回の②までに6組の発表をお伝えした。
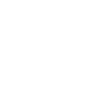
続く7組目の藤川秀行氏による「捜索・点検用 親子ドローン」は、2台のドローンを組み合わせた探索への取り組みだ。
飛行中の5インチArduCopter(親機)からFPVマイクロドローン(子機)が飛び出し、被災家屋やプラント内部などの狭所を飛行する。2台を連携させることで、小型ドローンのバッテリーを節約し飛行エリアを拡大する。
藤川氏は「高所、低所、被災地など、人が近づけない場所からの飛行を可能にする」と説明する。開発における今後の課題としては、親機から飛び立った子機の回収、子機から伝送される映像の高画質化、中継機器の搭載、子機のオートパイロットなどがある。
親子ドローンが切り離されて飛ぶ仕組みを解説する藤川秀行さん 屋外でのデモンストレーションでは、親機のパラメータ設定のトラブルなどで、残念ながら子機が離陸する様子は確認できなかったが、YouTubeには成功した動画が収められている。
■ArduPlaneによるVTOL機製作
8組目の松本威氏は、市販機での「ArduPlaneによるVTOL機製作」について発表した。
松本氏の製作したVTOL機は、市販機を改造したもの。狭い場所での離着陸と長距離飛行を両立させるVTOL機は、北海道で開催されている遭難者を探索するコンテストでの優勝を狙っている。松本氏は「市販のWingcopterのようなVTOL機は、約1千万円します。しかし、このArduPlaneによるVTOL機では、10万円で製作できます」とメリットを訴える。
デモ飛行の動画を紹介する松本威さん 直前のテスト飛行のさいにモーターが破損して煙を吹いてしまったことから、デモフライトは中止されたが、コスト面での利点は参加者に強烈な印象を残した。

開発中のVTOL機 ■OpenCVによる自動追尾オムニローバー
9組目の山田義久氏は「OpenCVによる自動追尾オムニローバー」を発表した。
同ローバーは、前後の駆動輪をギヤボックスで連動し、右側または左側のモータを制御することで、オムニローバーのような動きを実現する。
4つのタイヤで移動するローバーでは、主に2つの制御方法がある。ひとつは、後輪に駆動用のモーターを、前輪にステアリング用のモーターを取り付けて、ラジコンカーのように前後に移動中にステアリングを操作して左右に方向を変える方法。もうひとつは、左右のタイヤに独立したモーターを取り付けて、移動と回転を同時に行うスキッドステアリングという技術。キャタピラで移動する重機などが、スキッドステアリングに近い。
山田氏はモーターコントローラのポート数の関係から、2つのモーターで4輪ローバーを制御するために、前後の車輪を連動させた。
オミニローバーの仕組みや搭載b品について解説する山田義久さん MissionPlannerでプログラムされたコースを自動走行する計画をたてていたが、当日の会場では人工芝の摩擦抵抗が大きすぎて、オムニローバーは思うように前進できなかった。そこで、山田氏は、本体を手に持って、スキッドステアリングの動きに合わせて走り回り、コーナーでタイヤの回転が変化する様子を体現してみせた。

ローバーを手に持って走る山田義久さん。体を張って動きを再現した ■ドローンキットプログラムによる「同時自動・陸海空ドローン」
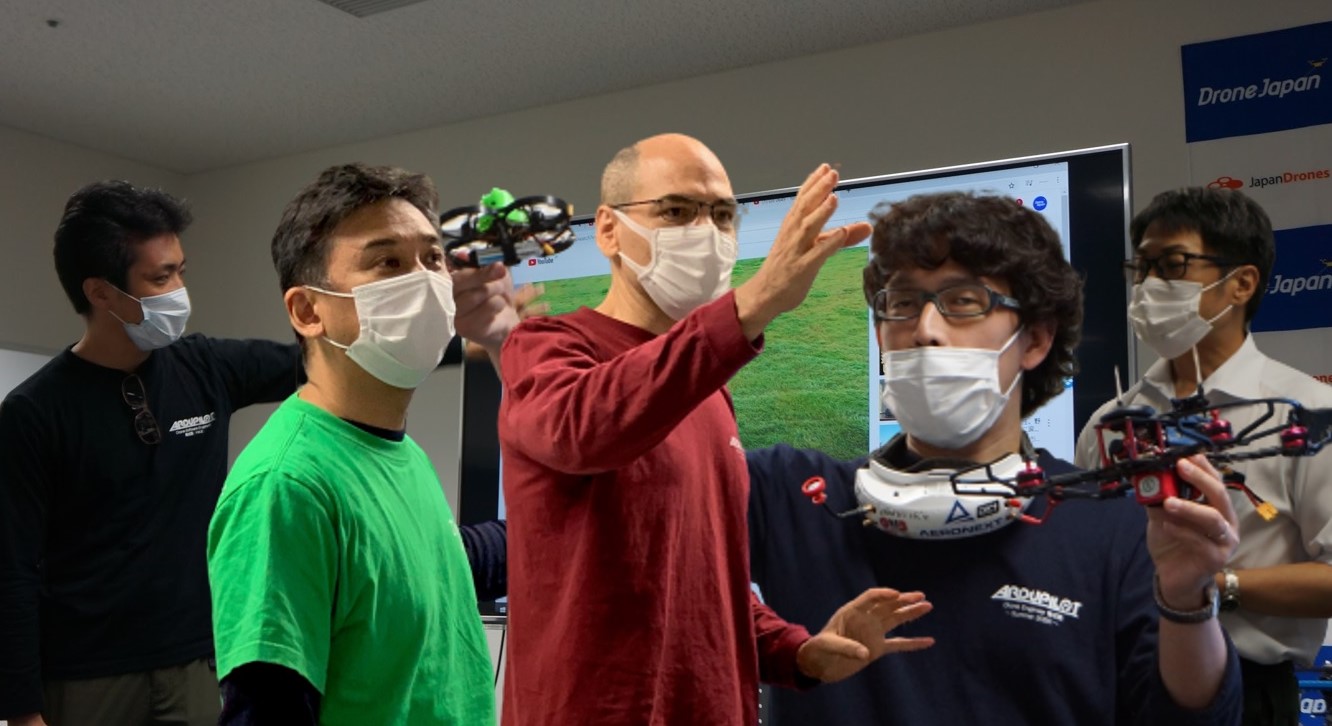
10組目の我田友史氏は、「ドローンキットプログラムによる『同時自動・陸海空ドローン』を紹介した。
我田氏は、マルチコプターとローバーをドローンキットプログラムにより、2台同時に制御するデモンストレーションを開発した。開発には、Pythonというスクリプト言語を利用し、2つのタイプが異なるドローンを同じコマンドで制御できるようにした。
2台のドローンを同時に制御できるメリットとして我田氏は「例えば、捜索などを想定したときに、ドローンで上空から海の遭難者を発見し、その位置情報を元に水上ドローンが救助に向かうという複合案が考えられます」と話す。その他にも、マルチコプターと水上ドローンとローバーを組み合わせて、テトラポットや堤防などの入り組んだ地形を複合的に捜索するアイディアも紹介された。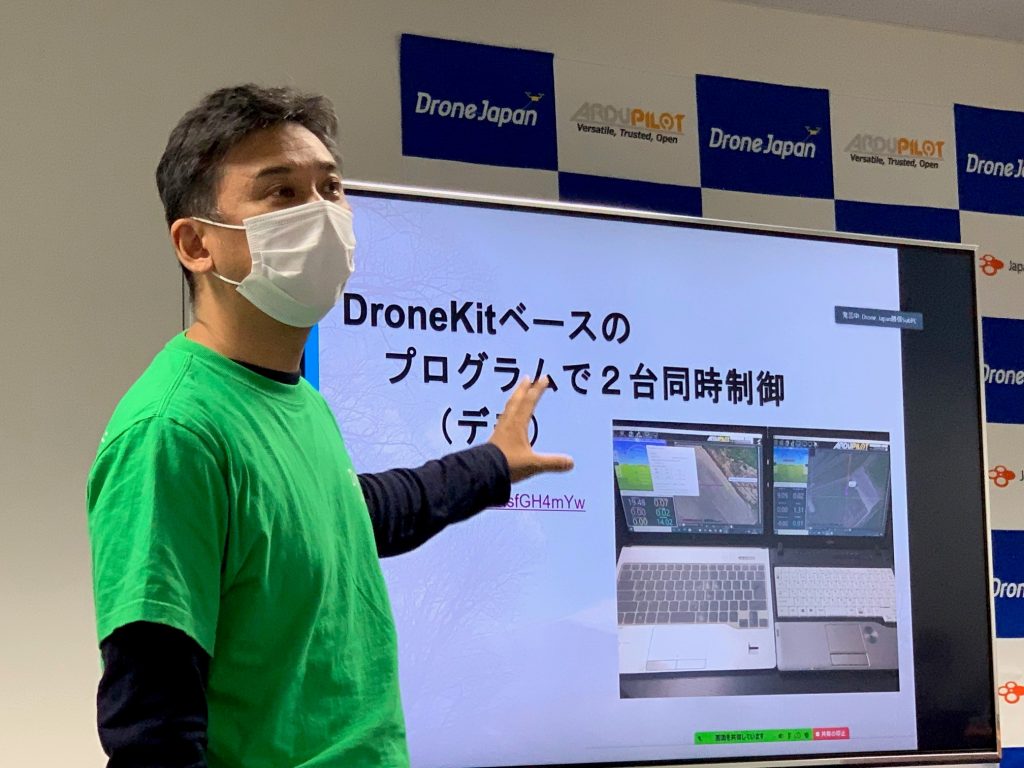
陸海空の活用例を説明する我田友史さん デモンストレーションでは、最初にマルチコプターがオートパイロットで飛行して、着陸した位置のデータが送信されると、その位置を目指してローバーが自動制御で走る予定だった。しかし、用意していたローバーにトラブルが発生し、動かないという物理的な問題に突き当たった。
そこで、4組目に登壇した高山氏の「ArduRover 無人自動散水車両」がピンチヒッターとして登場。同じ制御システムでオートパイロットが可能「な「ArduRover 無人自動散水車両」は、期待に応えて代打の役割を果たし、マルチコプターが着陸した地点に正確に移動してみせた。
トラブルの発生したローバーにかわり、高山誠一さんのArduRover無人自動散水車が緊急登板 
マルチコプターの着陸場所まで自動走行。見事な連携プレーを披露した ■デモンストレーションの大トリは塾長のローバーとマルチコプター
発表会の最後は、Randy Mackay塾長による2つのデモンストレーションが紹介された。ひとつめは、ローバーによる衝突回避システム。ローバーの前方に取り付けたカメラの映像をリアルタイムに解析して、障害物を検知してプログラムされたルートを自動で回避する。

障害物を検知するカメラが取り付けられたローバー デモンストレーションの会場では、次々と前方に立ちはだかる人物を検知して、停止か回避の行動をとっていた。

障害物を検知して停止するローバー 
たちはだかる障害物(笑) もうひとつのデモンストレーションは、T265センサーを使って、非GPS環境下で周辺の障害物などを認識しながら飛行することを想定した。塾長はT265が屋内環境で物質のエッジなどを捉えて認識するため、光量が強く目立った構造物のない屋外では、正確に周囲を認識できない恐れがあると分析。屋外で検証したところ、事前の分析通り、マルチコプターは安定した飛行を示さなかった。
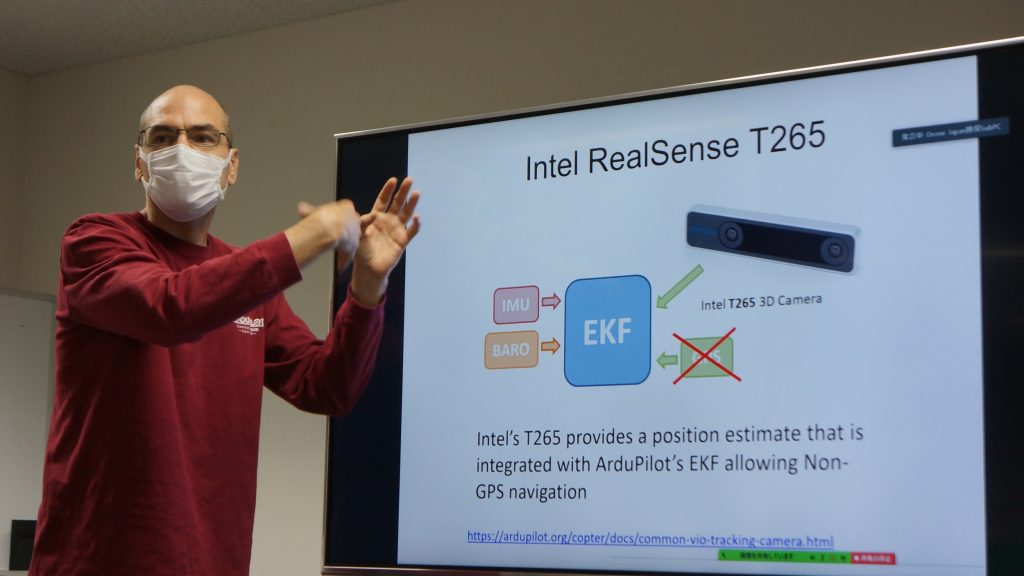
3Dセンサーで非GPS環境下での飛行を制御する仕組み説明するRandy Mackay塾長 
3Dセンサーを搭載したドローン デモンストレーションは仮説通りの動作を示したものや、仮設通りには動作しない要因を発見する機会になったものなど、多くの成果をあげた。塾長と塾生は、今後も日本のドローン産業や技術を盛り上げていくために、新たな研究や開発に取り組んでいく。

日本で実力をつけてきた「ドローンエンジニア養成塾成果発表」レポート①
日本で実力をつける「ドローンエンジニア養成塾成果発表」レポート②
日本で実力をつけていく「ドローンエンジニア養成塾成果発表」レポート③AUTHER
 田中 亘
田中 亘 -








 ベイスターズ、みなとみらいで3500機のショーを7/26に無料開催 運営はレッドクリフ
ベイスターズ、みなとみらいで3500機のショーを7/26に無料開催 運営はレッドクリフ  カープも本拠地でドローン演出 「ハローキティ&シナモロール ライブ&ドローンパフォーマンス」開催へ
カープも本拠地でドローン演出 「ハローキティ&シナモロール ライブ&ドローンパフォーマンス」開催へ  【JapanDrone2026】ゼンムテックが撮影データの無意味化技術「ZENMU-AONT」公開
【JapanDrone2026】ゼンムテックが撮影データの無意味化技術「ZENMU-AONT」公開  【JapanDrone2026】オートノミーダイナミクスが独自FC搭載の試作機Guardian Zero Ver.1を公開
【JapanDrone2026】オートノミーダイナミクスが独自FC搭載の試作機Guardian Zero Ver.1を公開  Prodorone、JIC系ファンド引受先に第三者割当 双方が発表
Prodorone、JIC系ファンド引受先に第三者割当 双方が発表  「おジャ魔女どれみ」のドローンショー7月開催 ドローンショー・ジャパン、東映デジマが主催
「おジャ魔女どれみ」のドローンショー7月開催 ドローンショー・ジャパン、東映デジマが主催  【JapanDrone2026】来場者は2万人超 各賞も決定
【JapanDrone2026】来場者は2万人超 各賞も決定  米Sky Elementsが400機でW杯の結果表示 Visit Seattleの企画「ドローン・スコアボード」
米Sky Elementsが400機でW杯の結果表示 Visit Seattleの企画「ドローン・スコアボード」  SkyDrive、チャーター運航のジェイビズと提携 日本国内の運航体制構築へ
SkyDrive、チャーター運航のジェイビズと提携 日本国内の運航体制構築へ  SkyDrive、インドネシアで実物大モックアップ展示 現地ヘリ運航大手と関係者向けイベント開催
SkyDrive、インドネシアで実物大モックアップ展示 現地ヘリ運航大手と関係者向けイベント開催





- 2026.7.10
AAM開発の株式会社SkyDrive(豊田市<愛知県>)とプライベートジェットやヘリコプターのチャーター運航事業を手掛ける株式会社Japan Biz Aviation(ジェイビズ、JBZ、東京)は7月9日、両者が業務提携したと発表した。日本国内での商業運航に向けた体制の構築などを進め、普及促進を図る狙いがある。
「プレオーダー、航空運送事業許可を持たない事業者が中心」の日本事情に対応
SkyDriveとJapan Biz Aviationの提携は、航空運送事業許可(air operator’s certificate、AOC)を持たない事業者が多くAAMへの期待を寄せている日本国内での普及促進を図る狙いがある。SkyDriveの機体のプレオーダーは、海外からはヘリコプター運航会社など航空運送事業許可を持つ事業者を中心に寄せられているが、日本国内では鉄道事業者などが中心だ。このため両社はAAMの日本国内の普及のため、航空運送事業許可を持たない事業者の期待に応えられる環境を整える準備を進める。
AOCは利用者から航空機を使い、対価を受け取って事業を行うために必要となる事業許可で、安全運行のために必要な人員、資機材、資産、システムなどが厳密に審査される。無許可の自家用機で有償事業を行った場合には懲役や罰金が科されることが決められている。SkyDriveの生産するAAMは航空機にあたり、事業に活用する場合にはAOCが必要になるが、現時点でプレオーダーを入れている事業者が、日本ではAOCを持たない事業者であることが多く、今後もAOCを持たない事業者が関心を寄せることが考えられることから、事業の構築スキームをあらかじめ準備することにより、円滑な普及につながる道筋を構築する。SkyDriveの発表とジェイビズの発表はこちら。
以下はSkyDriveの発表(Japan Biz Aviationの発表はそのあとに)
HondaJet(ホンダジェット)や Bell(ベル)へリコプターのチャーター運航等を展開する Japan Biz Aviation と「空飛ぶクルマ」の国内商業運航に向けた業務提携の基本合意書を締結
~既存の航空運送事業者の知見を活かし、国内における運航体制の構築を加速~

コンパクトな「空飛ぶクルマ」の開発・製造・販売を行う株式会社 SkyDrive(本社:愛知県豊田市、代表取締役 CEO 福澤知浩、以下「SkyDrive」)は、HondaJet(ホンダジェット)や Bell(ベル)へリコプター等のビジネスジェットやヘリコプターのチャーター運航等を展開する株式会社 Japan Biz Aviation(本社:東京都大田区、代表取締役 小泉 愼・冨永 政幸、以下「JBZ」)と、日本国内における「空飛ぶクルマ」の商業運航に向けた業務提携に関する基本合意書を締結したことをお知らせいたします。
■ 背景と目的
SkyDrive は現在、国内外から累計 427 機のオーダー(プレオーダー:354 機、機体購入基本合意:73 機)をいただいております。海外市場においては、ヘリコプター運航会社やチャーター機運航会社など、既に自社で航空運送事業許可(以下、「AOC」)を保有する企業によるオーダーが中心となっています。一方で、日本国内においては、鉄道会社などAOC を保有しない企業からのオーダーが多いという特徴があります。今後、空飛ぶクルマのサービス普及と市場拡大を実現させるため、豊富な運航・整備実績を持つパートナー企業と連携することで、安全かつ円滑な事業開始を目指します。その第一弾として、ビジネス航空分野で高い専門性を有する JBZ と、具体的な協議を進めることに合意いたしました。
■ 本基本合意書の内容
本合意に基づき、両社は以下の事項について継続的な協議を行ってまいります。
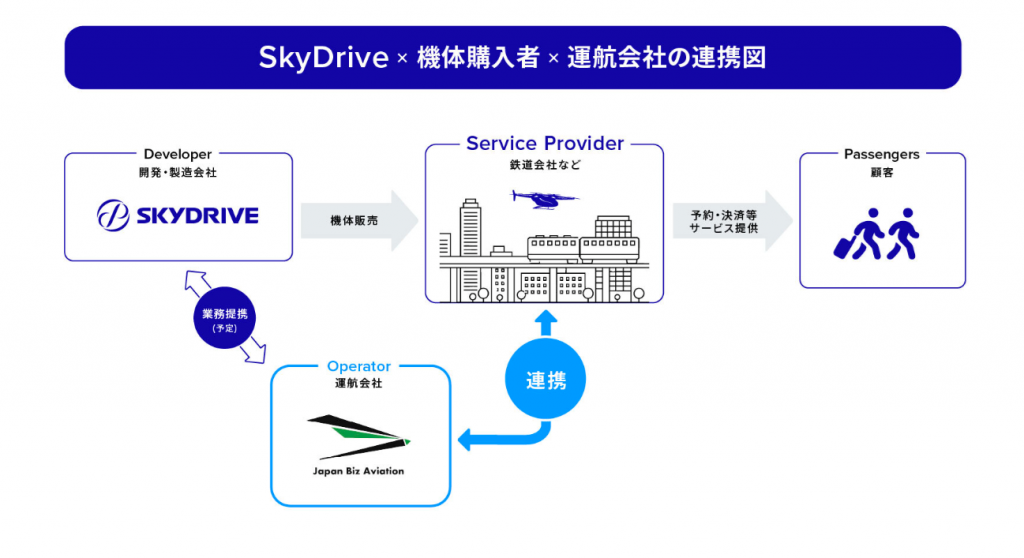
⚫ スキームの構築:SkyDrive、JBZ および機体購入者の役割分担の策定。
⚫ ロードマップの策定:運航開始時期および将来的な計画の立案。
■ 今後の展望
SkyDrive は、JBZ および今後予定している他のパートナー企業との連携を通じて、安心して機体を購入頂ける体制を構築してまいります。これにより、業界を問わずどの企業でも空飛ぶクルマを活用した事業展開を可能にし、国内における「空飛ぶクルマ」の社会実装を加速させてまいります。
■ 各社コメント
株式会社 SkyDrive 代表取締役 CEO 福澤 知浩
この度、ビジネス航空のスペシャリストである JBZ 様と基本合意書 を締結できたことを大変嬉しく思います。日本国内で空飛ぶクルマを普及させるためには、多様な企業が参入できる環境作りが重要と考えております。JBZ 様と共に、安全で信頼性の高い運航体制を構築し、新しい空の移動体験をいち早く届けてまいります。
株式会社 Japan Biz Aviation 代表取締役 小泉 愼
この度、SkyDrive 様と「空飛ぶクルマ」の国内商業運航に向けた業務提携に関する基本合意書を締結できましたことを、誠に光栄に存じます。当社はこれまで、富裕層をはじめとする航空機オーナーの皆様のご意向に寄り添いながら、HondaJet および Bell429 等の運航を通じて、安全を最優先とした高付加価値な移動サービスの提供に取り組んでまいりました。当社は、ビジネス ジェットやヘリコプターの利用を、日本における新しい移動の選択肢として文化に根付かせていくことを目指しております。本提携は、これまで培ってきた運航ノウハウを空飛ぶクルマ・eVTOL を含む次世代エアモビリティ 分野へ展開し、その可能性をさらに広げる重要な一歩であると認識しております。今後は、SkyDrive 様の技術力と当社の運航実務の知見を融合させ、日本における次世代エアモビリティの実現に向けた取り組みを一層加速してまいります。
以下はJapan Biz Aviationの発表
SkyDriveと「空飛ぶクルマ」の国内商業運航に向けた業務提携に関する基本合意書を締結
当社は、コンパクトな「空飛ぶクルマ」の開発・製造・販売を行う株式会社SkyDrive(本社:愛知県豊田市、代表取締役CEO福澤知浩、以下「SkyDrive」)と、日本国内における「空飛ぶクルマ」の商業運航に向けた業務提携に関する基本合意書を締結いたしましたので、お知らせいたします。
本合意は、日本国内における「空飛ぶクルマ」の商業運航に向け、SkyDrive、当社および機体購入者の役割分担や、運航開始時期等を含むロードマップについて、継続的に協議を進めるものです。当社は、国土交通省の認可(航空運送事業・航空機使用事業/東空事第29号)に基づく有償運航体制のもと、HondaJet等のビジネスジェットおよびBell429等のヘリコプターのチャーター運航、ならびに航空機の運航受託・管理事業を展開してまいりました。
また、航空機オーナーの皆様のご意向に寄り添いながら、安全を最優先とした高付加価値な航空移動サービスの提供に取り組むとともに、日本におけるジェネラルアビエーションの新しい所有・利用形態として、事業開始当初より航空機の共同所有スキームを展開し、個人・法人による航空機利用の裾野を拡げてまいりました。
当社は、ビジネスジェットやヘリコプターの利用を、日本における新しい移動の選択肢として文化に根付かせていくことを目指しております。
本合意は、これまで培ってきた運航実務の知見を、空飛ぶクルマ・eVTOLを含む次世代エアモビリティへ展開し、その可能性をさらに広げる重要な一歩であると考えております。今後は、SkyDriveの技術力と当社の運航実務の知見を融合させ、日本における「空飛ぶクルマ」の社会実装および次世代エアモビリティの実現に向けた取り組みを進めてまいります。
AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2026.7.9

AAM開発の株式会社SkyDrive(豊田市<愛知県>)はインドネシアのヘリコプター運航大手ホワイトスカイ(PT Whitesky Aviation)と、SkyDriveの機体「SKYDRIVE (SkyDrive式SD-05型)」のフルスケールモックアップ展示を含めた展示、講演などのイベントを6月下旬にジャカルタ近郊で開催した。インドネシア政府関係者や関連産業関係者らを対象にしたイベントで、現地での実装への取り組みが進んでいることを印象付けた。SkyDriveが海外でフルスケールモックを展示したのはインドネシアが初めてだ。
エアタクシーなど想定し早ければ2029年に実装を
SkyDriveとWhiteskyは昨年(2025年)8月に業務提携契約を結び、導入に向けた取り組みを重ねてきた。議論を重ねる中で、活用法などの具体化が進んだため、関連するインドネシア政府関係者、鉱山開発関連事業者、プランテーション関係者、航空事業関係者らを対象に展示、講演などのイベントを開催した。
会場はWhiteskyの施設「チェンカレンヘリポート」で、ジャカルタ近郊のバンテン州タンゲランにあるインドネシア最大の国際空港スカルノハッタ国際空港に隣接していて、開場には政府、民間企業のトップなどが訪れ、実機の外観、内装、サイズ感、居住性などを確認したほか、都市部の深刻な渋滞や地方、島の移動など移動にかかわる課題などについて意見交換が行われた。
早ければ2029年の商用化を目指しており、ジャカルタでのエアタクシー用途、鉱山・採掘エリアでの作業員移動用途などを軸に期待認証などの取り組みを進める方針だ。
SkyDriveが7月3日に公表したプレスリリースには参加者の声や関係者のコメントが紹介されている。
プレスリリースの全文は以下の通りだ。(注釈、会社概要など除く)
SkyDrive インドネシアでの商用運航開始に向けて、 政府・産業界と官民一体の取り組みをスタート
〜海外初となる空飛ぶクルマ「SKYDRIVE」のフルスケールモックアップを展示、 インドネシア市場の具体的な需要を確認、政府との認証取得への取り組みを具体化~
コンパクトな「空飛ぶクルマ」の開発・製造・販売を行う株式会社SkyDrive(本社:愛知県豊田市、代表取締役CEO 福澤知浩、以下「SkyDrive」)は、インドネシア最大級のヘリコプター運航会社であり、遊覧サービス、貨物輸送、医療搬送を行うPT Whitesky Aviation (以下、「Whitesky」)と共同で、2026年6月23日から24日の2日間、スカルノハッタ国際空港に隣接するWhitesky所有のチェンカレン ヘリポートにて、政府関係者および、鉱山、農園等の関係者を対象とした、イベントを開催し需要を確認いたしました。
インドネシア共和国では、年間約65兆ルピアに達するとされるジャカルタ首都圏の交通渋滞による経済損失や、国内主要産業の一つであり、各州の域内総生産(GRDP)において大きな割合(全体合計の約10%)を占める鉱業、総面積1,500万ヘクタールを超える広大な農園地帯におけるインフラ未整備に伴う物流・災害対策の遅れなど、都市と地方の双方で深刻な社会課題を抱えています。
本イベントでは、SkyDriveとして海外で初めて「SKYDRIVE (SkyDrive式SD-05型)」 のフルスケールモックアップを展示し、これらのインドネシア特有の社会課題解決に向けた具体的な空飛ぶクルマのユースケースのディスカッションおよび提案を行いました。

SkyDriveの実物大モックアップの前に並ぶ、インドネシア観光・クリエイティブ経済省デジタル創造・技術担当副長官、ムハマド・ニール・エル・ヒマム氏、インドネシア政府、産業界の代表、SkyDriveのメンバーら(2026年6月24日、SkyDriveのプレスリリースから) ■背景およびこれまでの進捗
SkyDriveとWhiteskyは、2025年8月にインドネシアにおける「空飛ぶクルマ」の社会実装に向けた業務提携契約を締結し(※5)、継続的なディスカッションと事業計画の策定を共同で進めてまいりました。
両社は当初、ジャカルタ首都圏における深刻な社会課題である「慢性的な極度の交通渋滞」の解決を目指し検討をスタートしました。空港から都市中心地への速達性の向上は極めて重要なテーマであり、スカルノハッタ国際空港に隣接するチェンカレンヘリポートと、ジャカルタ中心地を結ぶ「都市型エアタクシー航路」の開設に向けた具体的な議論を先行して重ねてきました。
この都市部における渋滞対策を一歩進め、両社はさらに、インドネシアの持続可能な成長を支える地方の主要産業地帯(鉱山や農園など)が抱える特有の課題へと議論を広げてまいりました。
資源の採掘現場(カリマンタン島、スラウェシ島、スマトラ島など)は、陸路の道路インフラが未整備で悪路が多く、移動効率の低下や、週に数回発生する労働災害時の緊急搬送体制に課題を抱えています。
また、農業分野においても、パーム油などの大規模プランテーションでは、敷地が非常に広大であることから、従来のドローンでは森林火災の早期発見やパトロールといった広域監視に限界が生じていました。
都市型エアタクシーの検討から始まった両社の議論は、これら地方の産業現場特有の課題に対しても空飛ぶクルマがオペレーションコストの削減と環境負荷の低減を両立する有効な解決策になり得るという結論に至り、今回のイベント開催および具体的な地方ユースケースの開拓を本格化させることとなりました。
■想定ユースケース
これまでのディスカッションを通じて、初期に想定していた都市型エアタクシーに加え、地方の主要産業において以下のエリアおよび使用方法における空飛ぶクルマの導入検討が進んでいます。
1.都市型エアタクシー(ジャカルタ首都圏)
スカルノハッタ国際空港からジャカルタ中心地や周辺スマートシティ等への、大渋滞を回避した迅速な送客。
2.鉱山・採掘エリア(カリマンタン島、スラウェシ島、スマトラ島など)
悪路により車やバスでの移動に時間がかかる現場における「作業員やエンジニアの移動(シャトル運航)」や、週に数回発生する労働災害や自然災害に備えた「救急医師の緊急搬送(ドクターヘリ用途)」としての活用。
3.広大な農園エリア(パーム油、製紙、砂糖等のプランテーション)
ドローンでは航続距離が制限される広大な敷地において、敷地オーナーや管理会社による「サイトモニタリング(見回り・パトロール)」や、毎年乾季を中心に発生する「森林火災の早期発見・初期消火コントロール」への活用。
現在、これらの現場では一部移動手段としてヘリコプターが活用されていますが、空飛ぶクルマに置き換えることで、オペレーションコストの削減、および排出ガスや騒音問題の解決が期待されています。
■本イベントの概要
- 開催期間:2026年6月23日(火)~24日(水)
- 開催場所:インドネシア チェンカレン ヘリポート
- 主な来場者:
・ インドネシア政府関係者(日本の国土交通省と経済産業省にあたる省庁の方)
・ 大手鉱山開発企業
・ 大手農業・プランテーション関係者
・ 航空業界関係者
イベントでは、海外初出展となる「SKYDRIVE(SkyDrive式SD-05型)」のフルスケールモックアップを前に、政府や民間企業のトップ層が実際のサイズ感や居住性を体感し、インドネシアの地方や都市部における導入に向けた熱心な意見交換が行われました。また、来場者より、「鉱山でのシャトル運航や農園の広域監視といった地方産業の課題解決、さらには都市部の渋滞回避など、インドネシア特有の多様なビジネスケースに使える」「ヘリコプターに代わる新たな移動手段としての経済性や、最先端技術がもたらす新しい産業創出の可能性が魅力的」等の声があがりました。
■コメント
インドネシア観光・クリエイティブ経済省 デジタル創造・技術担当副長官
ムハマド・ニール・エル・ヒマム(Muhammad Neil El Himam)氏
SkyDrive社が開発を進める空飛ぶクルマの技術は、我が国のクリエイティブ経済に革新をもたらす『新たな顔』です。同社の先進技術の導入は、単なる移動手段の進化に留まらず、新たな知的財産や専門職の創出といった多大な経済価値を生み出すと確信しています。インドネシアが自ら新技術を開発・管理できる国となるためにも、SkyDrive社のようなグローバル企業と現地パートナーが一体となり、産学官連携で『完全なエコシステム』を構築していくことが不可欠です。モビリティの未来を前進させる同社の挑戦を歓迎し、強力に後押ししてまいります。
■コメント
インドネシア運輸省 航空性・運航局長
ソキブ・アル・ロフマン(Sokhib Al Rokhman, S.SiT., S.T., M.T.)氏
我が国は次世代モビリティの新技術を歓迎しており、民間企業の取り組みを高く評価しています。航空の安全性とセキュリティに一切の妥協はありませんが、既存の規制枠組みを活用し、実証実験の場として複数の空港を提供するなど、柔軟に法整備を進める準備があります。SkyDriveのような外国製機体の導入に向け、将来的に日本の国土交通省(JCAB)と証明検証プロセスの協定を締結し、円滑な連携を図りたいと考えています。早ければ2029年の商用化を目指す計画に合わせ、今後約3年間で安全な商業運用に向けた規制整備に全力で取り組んでまいります。
■今後の展望
SkyDriveとWhiteskyは、今回のイベントで得られた各業界からの具体的なニーズ(人員・物資輸送、救急搬送、農園監視等)を基に、商用運航に向けた実証実験の計画や機体認証プロセスの構築をインドネシア政府と共に官民一丸となり、推進してまいります。まずはカリマンタン等の鉱山エリアや、ジャカルタ首都圏でのエアタクシー路線におけるインフラの整備や運航体制の構築を進めてまいります。

AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2026.7.4

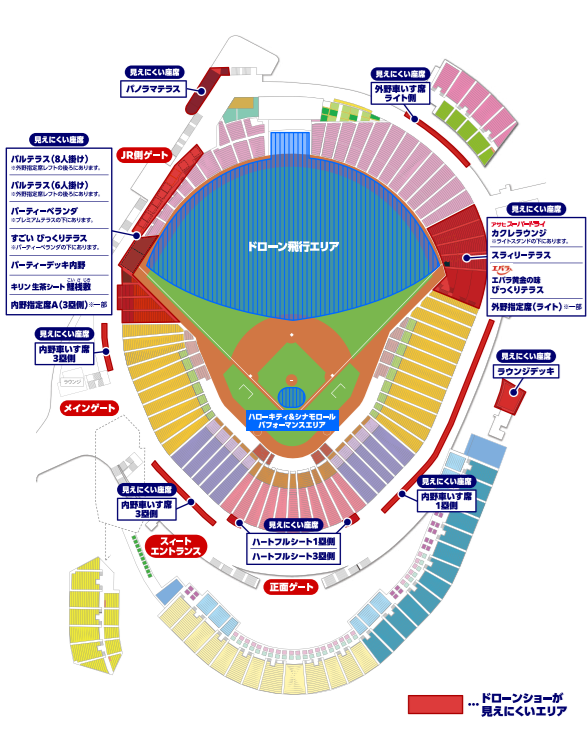
株式会社広島東洋カープ(広島市)は7月31日(金)~8月2日(日)にチームの本拠地、MAZDA Zoom-Zoomスタジアム広島(マツダスタジアム、広島市)で、ナイターの試合終了後にドローンの演出を含めた「ハローキティ&シナモロール ライブ&ドローンパフォーマンス」を開催すると発表した。マツダスタジアムでのドローンショー開催は今回が初めてとなる。
中日ドラゴンズ戦の試合後にグラウンド内で
マツダスタジアムでは7月31日、8月1日、2日に、いずれも午後6時から中日ドラゴンズとの試合を予定している。「ハローキティ&シナモロール ライブ&ドローンパフォーマンス」は各日開催される予定で、その中にドローンを使った演出が含まれる。
イベントでは各日の試合開始前の午後4時~4時20分に、スタジアムコンコースグッズショップ裏で「ハローキティ」「シナモロール」に会えるグリーティングが行われるほか、試合後のヒーローインタビューが終了したあとに、グラウンドの内野あたりで歌とダンスのパフォーマンスを披露するほか、外野あたりでドローンショーが行われる。
公式サイトには、天候により中止や内容変更の可能性を伝えているほか、ドローン飛行位置の都合によりスタジアムの一部エリアから見えにくい場合があることについて注意を促し、見えにくい場所についても案内している。またチケットの詳細についても公式サイトで確認できる。

AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2026.7.3

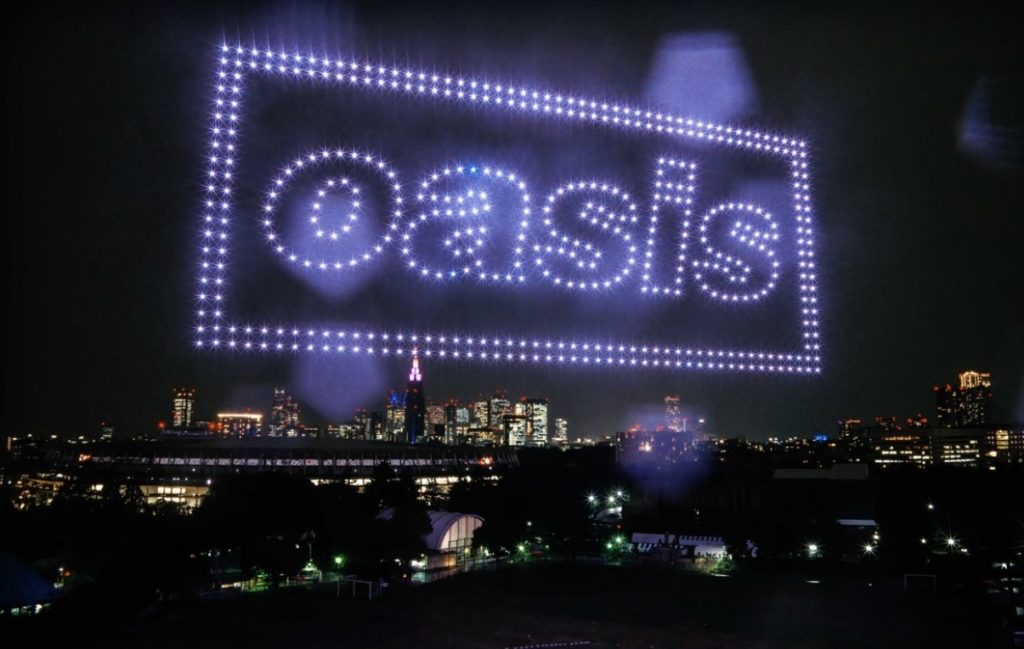
プロ野球球団を運営する株式会社横浜DeNAベイスターズ(横浜市)は、横浜・みなとみらいの臨港パークで、3500機のドローンを使うドローンショー「『YOKOHAMA STAR☆NIGHT DRONE SHOW』 in みなとみらいエリア」を7月26日に入場無料で開催すると発表した。開催時間などは未公表だ。ドローンショーの運営は株式会社レッドクリフ(東京)が担う。両社は9日後の8月4日から6日にかけても、横浜スタジアムで横浜DeNAベイスターズ対阪神タイガースの試合終了後に600機のドローンショーを行う。
8月4~6日には横浜スタジアムでも600機
横浜DeNAベイスターズが主催する「YOKOHAMA STAR☆NIGHT」は、みなとみらいで7月26日に予定される「『YOKOHAMA STAR☆NIGHT DRONE SHOW』 in みなとみらいエリア」と、8月4~6日に横浜スタジアムで行われる「『YOKOHAMA STAR☆NIGHT DRONE SHOW』in 横浜スタジアム」の2本立て。
このうち7月26日の「in みなとみらいエリア」では、3500機のドローンを飛ばす。ドローンの運航を担うレッドクリフは昨年(2025年)の大阪・関西万博で閉幕日の10月13日に3000機、今年(2026年)2月14日には東京・代々木公園で3030機を飛ばしていて、7月26日の「『YOKOHAMA STAR☆NIGHT DRONE SHOW』 in みなとみらいエリア」はそれを上回る規模になる予定だ。横浜・みなとみらいの臨港パークが観覧エリアになる。
なお荒天などに備え7月27日(月)を予備日としているほか、中止、内容の変更などの可能性もある。
また、ベイスターズの本拠地、横浜スタジアムでは8月4、5、6日に「『YOKOHAMA STAR☆NIGHT DRONE SHOW』in 横浜スタジアム」を開催し、600機のドローンと音・光・映像・花火を融合したショーを予定している。
『YOKOHAMA STAR☆NIGHT』は、2012年の横浜DeNAベイスターズ創設時から開催している夏のイベントとして定着していて、2014年以降は横浜銀行が後援するなどしている。ドローンショーは2019年に初めて行われこのときは100機が使われた。2024、2025年には500機のドローンでショーが行われた。
■「『YOKOHAMA STAR☆NIGHT DRONE SHOW』 in みなとみらいエリア」公式サイトはこちら
■横浜DeNAベイスターズの公式サイトはこちら
■レッドクリフのHPはこちら

©YDB ※画像はイメージです AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2026.6.27

JICベンチャー・グロース・インベストメンツ株式会社(JIC VGI、東京)と株式会社Prodrone(プロドローン、名古屋市<愛知県>)は6月24日、JIC VGIが運営する「JICベンチャー・グロース・ファンド2号投資事業有限責任組合」がProdroneに出資したと発表した。ProdroneにとってJIC2号ファンドを引受先とする第三者割当増資となる。両者とも出資額、増資額については言及していない。
「ドローン産業のサプライチェーン強靭化へ」
JIC VGIはProdroneへの出資について「本件の投資意義は、Prodroneへの出資を通して、産業競争力強化に資する産業用、防衛用のドローン技術の強化、事業化を支援するところにあります。その結果、産業用、防衛用ドローンのサプライチェーン強靭化に係る社会課題を解決するとともに、愛知県を本拠とするスタートアップの成功事例の創出を通じて地方創生に貢献していくことを企図しております。本件投資により、Prodroneの企業価値向上のため成長加速を支援します」と説明している。
またProdroneは「Prodroneは『地域から一番信頼されるドローンカンパニーになる』をビジョンに掲げ、中部圏におけるドローンエコシステムの構築を目指しています。今回の資金調達により、Prodroneが強みとするドローン技術のさらなる高度化と事業化を加速いたします。これにより、喫緊の課題である国内および愛知県を中心としたドローン産業のサプライチェーン強靭化へ、より一層貢献してまいります」と抱負を述べている。
JIC VGIは株式会社産業革新投資機構(JIC)が2020年に設立した、スタートアップの成長(グロース)支援やベンチャー投資を担うベンチャーキャピタルで、シード、アーリー期に限らずグロース期への支援にも重点を置いていることが特徴だ。
JICの発表はこちら
Prodroneの発表はこちら

AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2026.6.25

米国のドローンショー事業大手、Sky Elements社がFIFAワールドカップサッカー北中米大会の開催地のひとつ、シアトルの競技場での試合結果を400機のドローンで表示するドローンショーを展開中だ。シアトルの観光窓口を担うDMOでNPO法人のVisit Seattleが「ドローン・スコアボード」として企画した。6月26日には夜開催の試合結果を表示する。昼開催の試合と異なり、結果次第で表示内容は異なるため、試合同様こちらも時間との戦いになることが予想されている。
試合終了後にデータ書き換え 6月26日、7月6日は時間との戦いか
ドローン・スコアボードはシアトルでの試合が行われた当日の夜に、地元の観光名所である高さ184メートル(605フィート)の展望タワー、スペース・ニードル周辺で、対戦チームの母国の国旗とスコアをドローン400機で表示する。公式サイトではおすすめの観覧場所の案内もある。表示時間は12分程度だ。
開催時間は、試合当日の夜で、事前に公式サイトで予告されている。夜の試合となると、試合結果を確認してからドローンでの表示内容が決定するため、試合終了時刻から、告知されている公開時刻までの時間との戦いとなる。アディショナルタイムや延長戦、PKなどによっては時間との戦いが厳しくなることも予想される。
シアトルで開催される試合のうち、最初の夜(午後8時)キックオフの試合が、6月26日夜(日本時間6月27日)のエジプトvsイラン(グループG)だ。ドローン・スコアボードは、現地時間5月26日午後10時(日本時間6月27日午後2時)に試合終了、午後10時45分の表示を見込んでいる。短時間でデータ書き換え、転送システムなどの運用をこなし予定時間に表示できるかどうかが見ものだ。
さらに時間との戦いが難しくなる可能性があるのが、7月6日午後5時(日本時間7月7日午前9時)キックオフの「ラウンド16(決勝トーナメント)」だ。勝敗が決まるまで試合が続くため、最終的には延長戦やPKにもつれこむ可能性があり、予定公開時間までの短い時間で表示内容の調整を迫られる。
ドローンの運用を担うSky Elements社はシアトルのあるワシントン州ではなく、テキサス州に本社を構える。シアトルでのドローン・スコアボードには、テキサス本社とシアトルの現地が連携してプロジェクトを遂行する。テキサス本社ではエンジニアがデータの書き換え、生成試合が終了すると同時にスコアを入力し、400機分の飛行座標データ短時間で生成し、シアトルの現地では待機しているパイロットが、テキサスからのデータを受信し、機体にアップロードして夜空に飛ばすことになる。
米BBCの番組ではSky Elementsの担当者が、当日の試合結果を反映させて表示するリアルタイム性について「これまでに数多くのドローンショーを行ってきたが初めての経験」と話した。ドローン・スコアボードとドローンショーとの最大の違いはこのリアルタイム性で、数カ月かけて事前作成するドローンショーとは異なり、試合直後のデータ書き換え転送が要求される。このため、シアトルの試合ではピッチの外のドローンチームの奮闘も関心を集めそうだ。

開催国アメリカ代表がシアトルでのオーストラリア代表との試合で2-0で勝ったときのドローン・スコアボード(Visit Seattleの公式サイトから) AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -























































- ベイスターズ、みなとみらいで3500機のショーを7/26に無料開催 運営はレッドクリフ
- カープも本拠地でドローン演出 「ハローキティ&シナモロール ライブ&ドローンパフォーマンス」開催へ
- 【JapanDrone2026】ゼンムテックが撮影データの無意味化技術「ZENMU-AONT」公開
- 【JapanDrone2026】オートノミーダイナミクスが独自FC搭載の試作機Guardian Zero Ver.1を公開
- Prodorone、JIC系ファンド引受先に第三者割当 双方が発表
- 「おジャ魔女どれみ」のドローンショー7月開催 ドローンショー・ジャパン、東映デジマが主催
- 【JapanDrone2026】来場者は2万人超 各賞も決定
- 米Sky Elementsが400機でW杯の結果表示 Visit Seattleの企画「ドローン・スコアボード」
- SkyDrive、チャーター運航のジェイビズと提携 日本国内の運航体制構築へ
- SkyDrive、インドネシアで実物大モックアップ展示 現地ヘリ運航大手と関係者向けイベント開催