株式会社ヘキサメディア(埼玉県川口市、野口克也代表取締役)が、気象庁の火山活動調査を行ったことについて過日お伝えしたが、この調査でヘキサメディアは、立入禁止エリア外から、噴火口直上の撮影を遂行するため、赤外線カメラを搭載したドローンを、夜間に高度1200mまで上昇させ、距離にして4000m離れた場所へのフライトを行っている。難易度の高いこのミッションをどう遂行させたのか。代表の野口克也氏に聞いた。
早いバッテリー消費、広角でも600m頭上から見下ろす必要・・・高い難易度
――ヘキサメディアは今回の火山調査で、離れた場所から、地熱の影響を最小限にして噴火口直上の撮影をするという過酷な条件をクリアするため、夜間を中心に、高度1200m、距離4000mのフライトを実施しました。機体をどうしましたか?
野口代表 「(気象庁にも自分にも)前例のない撮影でしたので、手探りで機体選定を煮詰めていきました。具体的にはM210V2、Mavic2系(エンタープライズ含む)M600、Phantom4Proの中から、現地での使い勝手を考えてM210V2とMavic2EDにしぼりました。長距離、長時間、自動運航ができる機体で選びましたが、最終的にほぼ手動で飛ばしています。入札前にM210V2と、XT2が発売されて、伝送がLB2からオキュシンクに変わったのですが、ここがM210V2とXT2を選んだ理由として大きなウエイトをしめました」
――フライトではどのような工夫、準備をされましたか?
野口代表 「草津ー阿蘇、新燃ー口永良部という順番だったのですが、一つ一つ山の要件がそれぞれに違うので、ある一つのテクニックに力を入れた、とは言えません。たとえば草津は高度差こそあまり無いのですが、離陸場所の標高がすでに2000m近い場所です。とにかくバッテリーの消費が早いので、ここへの対応が必要でした。調査の基本の要求が火口周辺のオルソ撮影と、熱赤外線の真上からの撮影だったのですが、火口を1枚の赤外画像にしようとすると、13mmというXT2のなかで一番短い(広角)のレンズを持ってしても、火口から600m程度真上に上げる必要がありました。また、太陽光の影響を避けるために、夜間の撮影を提案しましたが、これは自分でハードルを上げて、自分で引き受けた感じです」
――距離も被写体から離れていました。
野口代表 「いずれの条件も、『立ち入り禁止区域外からの観測実習』なので、火口から2kmから3km離れた場所からの撮影になりました。火口を600mくらい見下ろすので、さきほどお伝えした距離と高度になった次第です」
高高度撮影、降下速度に注意を
――かなり神経を使いそうです
野口代表 「とにかく落とさないを目標にして、特に風の状態は神経を使いました。幸いにもどの観測地も、強風で全く無理、という日程に当たらなかったので乗り切れました。ただ、あとでログを確認して分かったことですが、口永良部では部分的に10m/sを超える風速になっていました」
――バッテリーは
野口代表 「バッテリーマネージメント、と言いますが、具体的には垂直方向のナビゲーションと時間管理です。普段、100mや150mの飛行に慣れていると、下降にかかる時間は計算に入れないと思います。水平方向は10m/sや15m/sくらいは出るので、仮に3000m進出していても、200秒(3分半)~300秒(5分)で帰ってこられるのですけれども、垂直方向はそんなにスピードでないのです。下降速度が3m/sに抑えられている都合上、1200mから降りてくるのに、400秒(7分弱)かかるのです。1200mの高度から帰ってくるには、200秒で離陸ポイント上空まで帰ってきても、まだ高度が600m残っていますので、そこからさらに3分半くらい降下に時間がかかります。M210でXT2をつけていると、TB55で25分、実質20分なので、帰還決断時間を間違えると、直上には帰ってきているのに、バッテリー切れになって、頭上数百メートルから落下することになります。一般に、この降下にかかる時間を計算にいれていないことが多いです。水平距離だけだと、「まだまだ余裕があるな」と、思ってしまい、降下速度の罠に陥ることが起こります。バッテリーの消耗と全体の撮影ボリュームから逆算しての降下帰還決断タイミングが、このミッションのキモでした」
――別の機体の降下と異なりますか?
野口代表 「過去にはインスパイア2などで、南硫黄島の上を1000mとかで飛ばしていましたが、インスパイア2は9m/sという異常な降下速度で降りることができ使いやすかったです。今回は伝送距離も考えてM210でした。この観測の後に発売されたM300RTKも当初3m/sの降下速度固定でしたが、ファームアップで4m/sになりました。
撮影時間わずか! 目視による手動撮影を選択
――撮影のほうはいかがだったでしょうか?
野口代表 「オルソ撮影も、苦労がかなりありました。測量されている方からは全くなっとらん!って怒られそうですけれど、前述の通りで、とにかく火山上空に行くだけでほぼバッテリーがなくなる状態です。火山上空でオルソ撮影に割ける時間はごくわずかしかありません。また、火口裏側などに自動運航で行ってしまうと、電波が途絶えて、帰還決断もできなくなってしまいます。そして、GSProもLitchiも飛行開始した場所から500m以上のプランが組めません。なんとか成立させるには、斜め写真も入れた目視によるラップの手動撮影を選択しました。高精細なカメラを積んで、3キロ離れた場所から1500mくらい上げて、余裕で1時間くらい飛ぶ機体があれば、なんとか出来たのでしょうが。このあたりに限界を感じました。」
――今回のミッションで発見したことはありますか?
野口代表 「今回の観測ミッションはエリアの広さ、高度、スケール感が、ドローンの業務というよりも、実機ヘリコプターでの観測に近いところがありました。風の流れの読み方も、バーチカルナビゲーションも、ヘリの実機に近い。そして、どの火山の上も、実機で飛んだ経験があったので、そういったこともあって乗り越えられたのではないかと思います。申請関係でも、高高度、夜間、目視外の申請はもちろん行いましたし、実機の各訓練区域との調整など、チームワークで乗り切った部分も多かったです。出向く場所はたいてい電波のない地方での撮影。今回も誰も経験したことがない観測で、ほかの誰にも頼れない中で、乗り切るしか無いという状況でしたが、それまでのさまざまな場所でのフライト経験はかなり役立ったと思っています。特に西之島、南硫黄島などの完全電波遮断地での撮影経験は大きいです」
――いま伝えたいことがあれば
野口代表 「ここ数十年は日本全国の火山は比較的穏やかであったと思います。しかしこの先十年も同じかというとそういうことはなく、いままで休憩していた火山が活動期に入ると思われます。火山活動予測、避難誘導、付帯的な災害の観測、予報などはこれまで以上に重要になりますし、ドローンはそこで大きな役目を担うと思います。その第一歩として、安全地帯からの長距離観測の一番手として旗を上げさせて頂いたことは、ありがたいと思います」
――ありがとうございます。



AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。- 2020.7.29

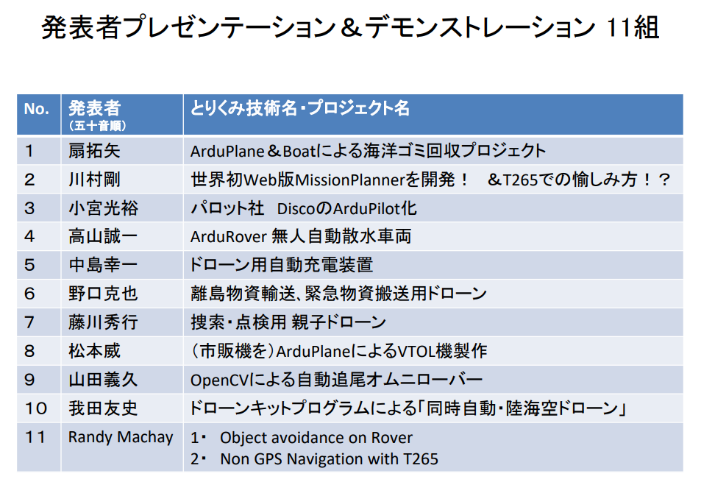
軽井沢で開催された「ドローンエンジニア養成塾」の成果発表会&デモイベントの様子を、前回に続いてお届けする。発表会には1期から9期までの卒業生から選ばれた10組と、塾長のJapanDrones株式会社(本社:長野県)のRandy Mackay代表を合わせた11組が成果を披露した。各組は午前に屋内会場で発表を行い、午後に屋外でデモフライトに臨んだ。本稿では前半6組の発表内容とデモフライトを紹介する。(田中亘)
■ArduPlane&Boatによる海洋ゴミ回収プロジェクト

発表に臨む扇拓矢さん 1組目の扇拓矢氏による発表は、「ArduPlane&Boatによる海洋ゴミ回収プロジェクト」。手作りの水上ドローンを使い、池や堀などに投棄された水面のゴミを回収する取り組みだ。
水上ドローンは、2つのスクリューで走行する。船体の方向転換は、左右スクリューの推力差(Skid Steering)で実現する。会場ではボディボードを切断して浮力にした本体が展示された。今回は、会場での水上ドローンのデモンストレーションは行われなかったが、発表会では実験の様子を動画で紹介した。
扇氏は、JAXAのイノベーションプロジェクトに応募したことを報告。「計画は、プレーンで上空から海上のゴミの場所を検索し、そのマップ情報をもとに、船やローバーで回収にかけつける、という内容です。採択されたらみなさん手伝ってください」と塾生に呼びかけていた。
■世界初の
Web版MissionPlanner!
タブレットを手にプレゼンテーションをする川村剛さん 続く川村剛氏は、「世界初Web版MissionPlannerを開発! &T265での愉しみ方!?」を発表した。
MissionPlannerは、ArduPilotで飛行するドローンなどをPCで制御するアプリケーション。川村氏は、そのアプリケーションをWeb版に移植した。Web版のMissionPlannerは、通信回線さえあればタブレットで利用できるメリットがある。
用意されている機能は、自動航行のミッションアイテムの一覧、通常のマップ上にオリジナルマップの重ね合わせ、機体のパラメータ確認などだ。また、ログの一覧を確認したり、任意のログをダウンロードしたりすることもできる。さらに、Intel RealSenseのトラッキングカメラT265ストリーミングに対応し、ドローンに搭載したカメラからの映像を単独の画面で確認できる。川村氏は、「今後はストリーミングと障害物検知の組み合わせに挑戦したいと考えています」と話す。
養成塾の調べでは、Web版のMissionPlannerは世界初という。
Web版Missionplannerのデモ動画 ■DiscoのArduPilot化!
毎回ユニークな機体に挑戦する小宮光裕さん 3組目に登壇した小宮光裕氏は、「パロット社DiscoのArduPilot化」を発表した。
1期卒業の小宮氏は、過去にもDJI製ドローンのフライトコントローラーをArduPilot化するなど、既製品の高性能化や、オリジナルVTOL機の作成にも取り組んできた。
今回のパロット社Discoは、デルタ翼のドローンで、7万円前後で購入できるホビー機。45分の連続飛行が可能で、機体の前方に装備されているカメラの映像をゴーグルで見ながら、鳥のような飛行体験が得られる。しかし、パロット社の提供しているフライトコントローラーは、コントローラーでの操作を基本にしたもので、飛行の自由度は低い。そこで、小宮氏はArduPilotのファームで運用できるように改造し、自由度の高い飛行制御を可能にした。
小宮氏によれば「自由度の低いフライトコントロールをAruduPilotにすることで、様々な機能を実行できるようになる」という。実は、パロット社では、自動航行などの高性能な飛行性能を備えたeBeeという産業向けのデルタ翼ドローンも販売している。eBeeの価格は、RTKモデルで約400万円。Discoとの価格差は大きい。小宮氏は「7万円のDiscoで、400万円のeBeeと同じ運用ができたらいいな」と考えて、ArduPilot化に取り組んだ。
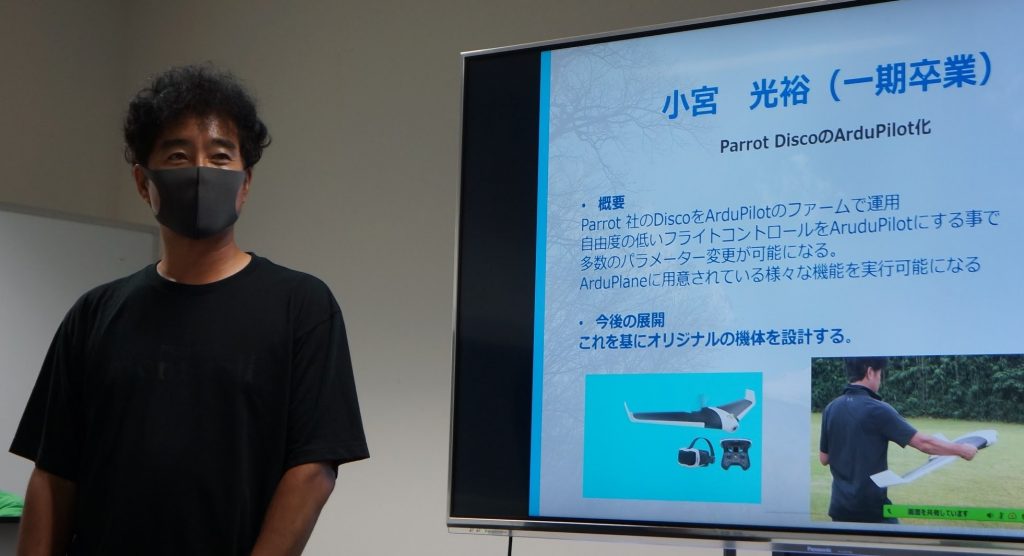
午後のデモンストレーションでは、ArduPilot化されたDiscoのデモフライトが行われた。小宮氏の手から飛び立ったDiscoは、プログラムされた周回軌道を自動航行で飛行した。会場の広さに制約があったため着陸は小宮氏がコントローラーで行った。
参加者は、Discoの自動航行に感心するだけではなく、ドローンパイロットとしても超一流の小宮氏の操縦テクニックにも魅了されていた。
(ArduPilot化さ

Ardu化されたDiscoを離陸シーン。小宮さんの操縦技術の高さも参加者を魅了した 
会場の上空を舞うDisco ■ArduRover 無人自動散水車両

ArdyRover無人散水車を発表した高山誠一さん 4組目の高山誠一氏は、「ArduRover 無人自動散水車両」を発表した。
市販のトラック型ラジコンを改造し、荷台の上に水を入れたタッパーウェアを置いて、USB電源で動くモーターを組み合わせた給水システムを配管。走行時に穴を開けたビニール管から水が滴り落ちる構造だ。高山氏は「ベースはタミヤの1/24 RCヘビーダンプというラジコンカー。そこにPixhawk miniを搭載しました」と説明した。
開発において高山氏は「なかなか真っ直ぐに進まないので苦労しました。将来的には、広い面積を自動で散水できるようなローバーを設計したいので、みなさんに見てもらい、フィードバックをもらえたら」と話した。
デモンストレーションでは、会場の人工芝がArduRoverのタイヤにとって抵抗が大きく、思うように進まない場面もあった。それでもあらかじめプログラムされた経路を自動で散水する動きが確かめられ、今後の可能性の大きさを証明した。

■ドローン用自動充電装置
自動充電ドローンを手に説明する中島幸一さん 中島幸一氏は「ドローン用自動充電装置」を発表した。ドローンを自動で充電する給電ステーションで、ドローンが着陸すると、センサーが感知して自動でドローン側に設けた電極に充電器を接続させる仕組みだ。
充電装置はすり鉢状の構造になっていて、IR-Lockによりドローンは正しい向きで着陸する。ドローンには専用の脚が取り付けられていて、着陸するとすり鉢の溝と脚が連動して、正確な位置に滑り落ちて固定される。着陸を感知すると、充電用の電極を備えた装置が開いて、ドローン側の電極に接続される。一連の動作は自動化されているので、ドローンの充電ポートとしての利用が期待できる。一方で中島氏は「ドローン側に電極を取り付ける位置が限定される点が課題」と説明した。
(すり鉢状の給電ステーションは左側の電極がドローンの着陸後に自動で開いて充電する)

持参したすり鉢状の給電ステーションを見せながら説明する中島さん(左) 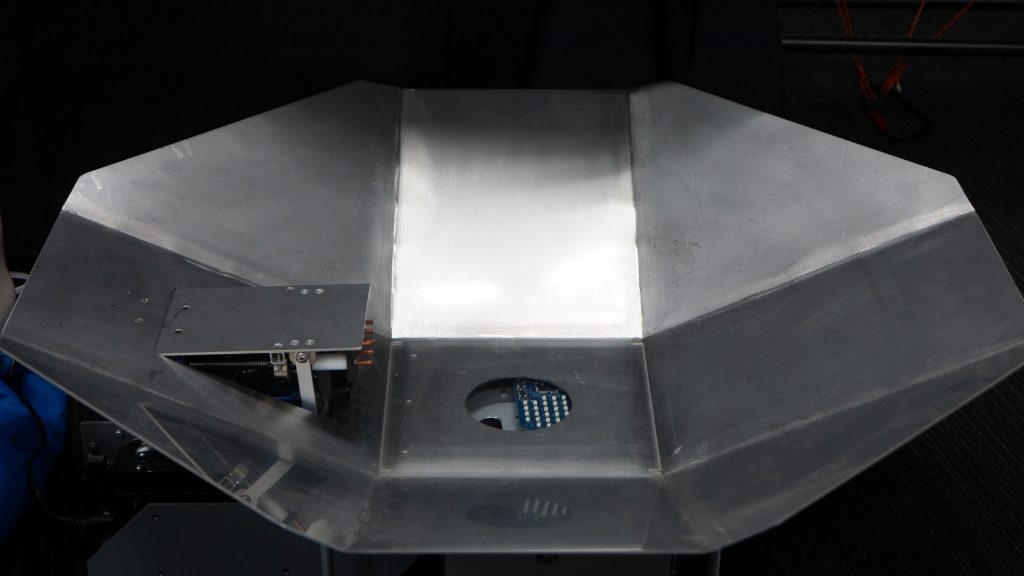
給電ステーションは向かって左側にある電極がドローンの着陸後に自動で開き充電を開始する ■緊急物資搬送用ドローン

輸送用ドローンについて説明する野口克也さん 6組目の野口克也氏は、「離島物資輸送、緊急物資搬送用ドローン」を紹介した。
野口氏は農薬散布用の大型ドローンを改修して、Ardupilotで運用できる物資輸送のプラットフォームドローンを開発した。その特徴は、自動で貨物を切り離せる構造を備えた長吊りシステムで、目的地への物資輸送を可能にする。切り離し装置は、機械式になっていて、フックに吊り下げられた荷物が地面に降ろされて負荷がなくなると、自動で開いて紐などをリリースする。
フライトコントローラーには、ADS-B搭載のPixhawk2.1 Cube Orangeを搭載し、オートパイロットも目指している。デモフライトは行われなかったが、会場では機体を披露しながら機能と活用場面などについて説明した。
次回は残る5組の発表内容を紹介する(続く)

機体を説明する野口さん 
発表に臨んだ参加者の記念撮影 AUTHER
 田中 亘
田中 亘 -
- 2020.7.26
JapanDrones株式会社(本社:長野県、代表:Randy Mackay氏)とドローンジャパン株式会社(本社:東京、代表:勝俣喜一朗)が協働で運営しているドローンエンジニア養成塾は2020年7月19日、同塾の塾生から選ばれた代表者による成果発表会&デモイベントを軽井沢で開催した。会場では養成塾の1~9期生から10組が集まり研究成果を発表し、屋外でデモンストレーションを披露した。日本で実力をつけてきたドローンエンジニアの研究の最前線である発表会とその成果が目の前で見られるデモンストレーションの様子をレポートする。(田中亘)
ドローン業界におけるArduPilotとは

ドローンエンジニア養成塾が開催した成果発表会&デモイベント=2020年7月19日、長野・軽井沢 発表会の冒頭、ドローンジャパンの春原久徳取締役会長が登壇し、「ドローン業界におけるArduPilot」と題した挨拶を行った。
春原氏は、2014年にビジネスとしてドローンに関わってきた自身の歴史を振り返り、2015年にドローンコードで有名だった3D Roboticsのクリス・アンダーセン氏と知り合い、軽井沢に住むカナダ人のRandy Mackay氏を紹介された経緯を語った。Mackay氏の快諾により、2016年からドローンエンジニア養成塾はスタートした。春原氏は、塾の経緯を語ったあとに、ドローンエンジニア養成の中心となるArduPilot(アルデュパイロット)について説明した。
ドローンのプログラミングについて説明するドローン・ジャパンの春原久徳会長 まず、春原氏はドローン関連のプログラムの種類について整理した。大きく3つに分けられ、それぞれ、ドローンの飛行そのものを司る「機体制御」、ドローンの航行を管理する「機体管理」、ドローンで集めたデータを処理する「情報処理」だ。
このうち、「機体制御」に不可欠な、オープンソースのフライトコントローラーがArduPilotだ。
ArduPilotは、ドローンに搭載されたPixhawkなどのオンボードコンピュータで動作するソフトウェア。Pixhawkのコネクタを介して、モーターの回転を制御したり、GPS機器からの位置情報などを処理したりする。また、各種センサーやコンパニオンコンピュータなどと連動して、より安全な機体制御や衝突回避を行う。
一方の「機体管理」では、Mission Plannerに代表される航行管理ソフトによって、ドローンの自律飛行を支援する。ドローン養成塾では、オープンソースで誰もが自由に利用できるArduPilotやMission Plannerの技術を教えることで、日本のドローン技術者の育成やスキルの底上げに貢献してきた。春原氏は「ArduPilotの魅力は、ソースコードがオープンなので、技術者がテクノロジを理解しつつ、自由にドローンソフトウェアが開発できる点にあり、技術者のワクワク感を喚起します」と話した。
その成果を塾生同士で実感してもらうために、1~9期の卒業生の中から10組とRandy氏が発表会に参加した。
発表者と内容は以下の一覧の通りだ。
ArduPilotの技術概要と最新動向
続いて、ArduPilotの技術概要と最新動向を伝えるために、塾長のRandy Mackay氏が登壇した。
Mackay氏は、ArduPilotの利活用を促進する最新デバイスとして、高性能なフライトコントローラーの最新機器を紹介した。その特長について Mackay氏は「最新のフライトコントローラーは、メモリとCPUが、5倍から10倍に進化しています。そのおかげで、開発言語のC++だけではなく、Lua Scriptが使えるようになりました」と説明した。Lua Scriptは、汎用スクリプト言語で、Perl、Python、Rubyと比較して高速に動作する。

注目の最新ハードウェアについて説明するドローンエンジニア養成塾のRandy Mackay代表 Mackay氏が紹介したフライトコントローラーの多くは、CPUにSTM H7を採用し、衝突回避や非GPS下でのナビゲーションを可能にしている。加えて、ADSBによる有人飛行機の確認や、高信頼のIMUによる自律飛行のサポートなどが特徴だ。
次にMackay氏は、GSFというソフトウェアを紹介した。GSFは、複数のコンパスから得られた情報を判断して、正しい方向を見出す技術。単一のコンパスで飛行しているドローンは、地面に金属が置かれていたり、強い磁力が発生したりすると、方向を見失う危険がある。それに対して、GSFを利用すると、複数のコンパスから収集される情報を判断して、正しい方向を計算する。その様子を紹介した動画が映し出された。
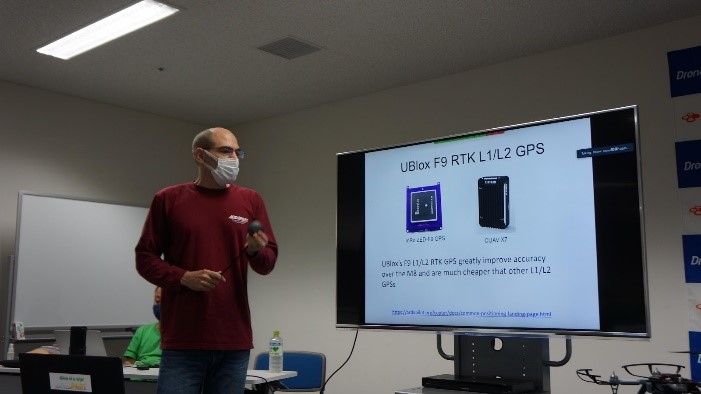
さらに、飛行の安定性に貢献する最新デバイスとして、UBlox F9 RTK L1/L2 GPSが紹介された。
従来のGPS機器では、3m前後の測位ミスが起きてることがある。しかしこのUBloxF9 RTK L1/L2 GPSでは、GPSだけで75cm以下の精度があり、RTKを組み合わせると10cm以下の精度が得られる。特筆すべきは価格で、3万円から購入することが可能だ。それまで40万円以上が相場だった高精度GPSが、各段と安価で手に入れられるようになった。
低価格で高性能なGPSを紹介するMackay氏 最後にMackay氏は、インテル製の3Dカメラを紹介した。
そのひとつ、Intel D435 Depth Cameraは、深度計測が可能なカメラで、もうひとつのIntel T265 3D Cameraは物体の距離や位置を3次元に計測できるカメラだ。これらのカメラを活用することで、非GPS下でも飛行ナビゲーションや衝突回避が可能になる。実際に海外のエンジニアがD435カメラを搭載して屋内で衝突を回避する様子が動画で紹介された。
成果発表会はRandy Mackay氏の講義に続き、参加10組のプレゼンテーションに移った。それぞれがこれまでに力を入れてきた研究成果を披露した。
その様子は次回にお届けする。(続く)
TAG
AUTHER
田中 亘 -

















 モータ、フライトコントローラ、バッテリなどで強い危機感 政府、国内のドローン供給網強化へ パブコメ募集中
モータ、フライトコントローラ、バッテリなどで強い危機感 政府、国内のドローン供給網強化へ パブコメ募集中  SkyDrive、東京で初のデモフライト 飛行中のヘリと音量差が歴然
SkyDrive、東京で初のデモフライト 飛行中のヘリと音量差が歴然  文京区、ブルー、JUIDAが災害支援の協定 JUIDAは都心23区との提携拡大視野
文京区、ブルー、JUIDAが災害支援の協定 JUIDAは都心23区との提携拡大視野  SkyDrive福澤代表、特派員協会の会見でコンパクトの優位性アピール 日本製へのこだわりも説明
SkyDrive福澤代表、特派員協会の会見でコンパクトの優位性アピール 日本製へのこだわりも説明  エアロジーラボのG4-S、往復72㎞を無給油で飛行 九州整備局が南海トラフ対策の実験
エアロジーラボのG4-S、往復72㎞を無給油で飛行 九州整備局が南海トラフ対策の実験  ブルーがドーム屋根の漏水箇所特定にドローン活用 ELIOS3が内装側を飛行、外装はMatrice 3TD
ブルーがドーム屋根の漏水箇所特定にドローン活用 ELIOS3が内装側を飛行、外装はMatrice 3TD  音楽とドローンの2026年への期待 2025年には「RED LINE」や「ジ・エンプティ」話題
音楽とドローンの2026年への期待 2025年には「RED LINE」や「ジ・エンプティ」話題  「JUIDA新年の集い」東京會舘で開催 総選挙公示日と重なり政治家の姿なし
「JUIDA新年の集い」東京會舘で開催 総選挙公示日と重なり政治家の姿なし