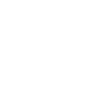
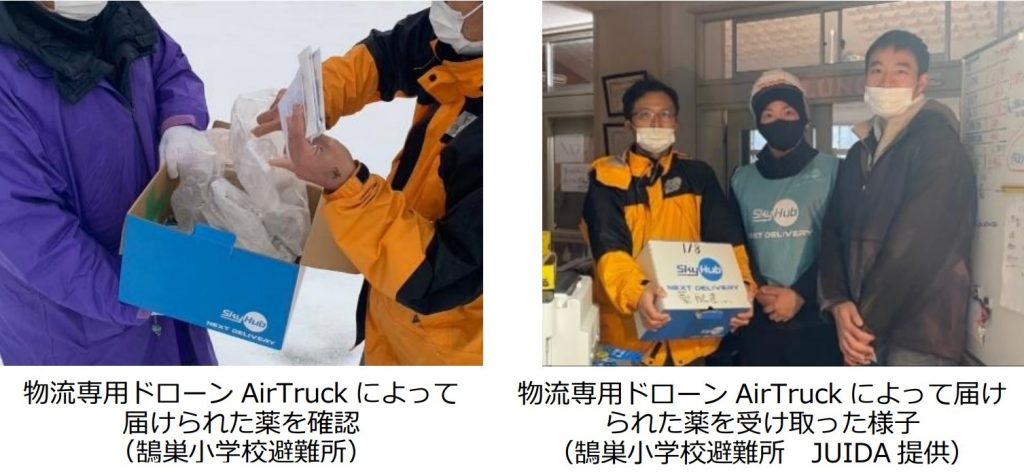
NEXT DELIVERY などドローンの運航チームは1月8日から活動を続けている。荷物の届け先は輪島市の中心部から東に約3㎞の場所にある輪島市立鵠巣小学校に設けられている避難所だ。鵠巣小学校の周辺は市の中心部から直線距離で3㎞にすぎないが道路の寸断で自衛隊員でもたどりつくのに1日かかるほどの孤立集落となっている。AirTruckは医薬品を10分で運ぶなど、集落の要請にこたえるべく奮闘している。AirTruckは2台持ちこまれており、現地の要請に耳を傾けながら活動する方針だが、今後の活動期間などは1月10日夕刻時点で確定的ではないという。
AAM開発の株式会社SkyDrive(豊田市<愛知県>)とプライベートジェットやヘリコプターのチャーター運航事業を手掛ける株式会社Japan Biz Aviation(ジェイビズ、JBZ、東京)は7月9日、両者が業務提携したと発表した。日本国内での商業運航に向けた体制の構築などを進め、普及促進を図る狙いがある。
「プレオーダー、航空運送事業許可を持たない事業者が中心」の日本事情に対応
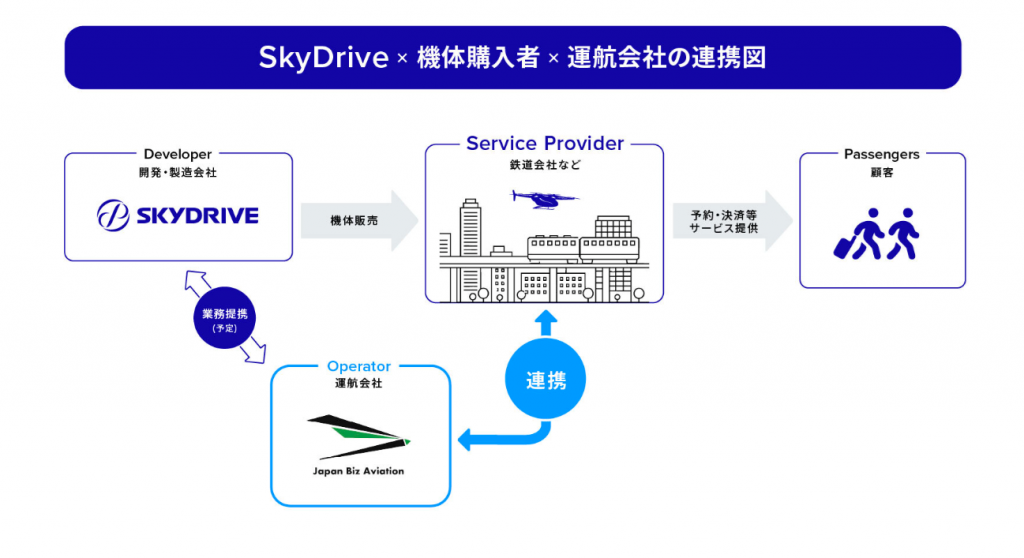
SkyDriveとJapan Biz Aviationの提携は、航空運送事業許可(air operator’s certificate、AOC)を持たない事業者が多くAAMへの期待を寄せている日本国内での普及促進を図る狙いがある。SkyDriveの機体のプレオーダーは、海外からはヘリコプター運航会社など航空運送事業許可を持つ事業者を中心に寄せられているが、日本国内では鉄道事業者などが中心だ。このため両社はAAMの日本国内の普及のため、航空運送事業許可を持たない事業者の期待に応えられる環境を整える準備を進める。 AOCは利用者から航空機を使い、対価を受け取って事業を行うために必要となる事業許可で、安全運行のために必要な人員、資機材、資産、システムなどが厳密に審査される。無許可の自家用機で有償事業を行った場合には懲役や罰金が科されることが決められている。SkyDriveの生産するAAMは航空機にあたり、事業に活用する場合にはAOCが必要になるが、現時点でプレオーダーを入れている事業者が、日本ではAOCを持たない事業者であることが多く、今後もAOCを持たない事業者が関心を寄せることが考えられることから、事業の構築スキームをあらかじめ準備することにより、円滑な普及につながる道筋を構築する。
HondaJet(ホンダジェット)や Bell(ベル)へリコプターのチャーター運航等を展開する Japan Biz Aviation と「空飛ぶクルマ」の国内商業運航に向けた業務提携の基本合意書を締結
~既存の航空運送事業者の知見を活かし、国内における運航体制の構築を加速~
コンパクトな「空飛ぶクルマ」の開発・製造・販売を行う株式会社 SkyDrive(本社:愛知県豊田市、代表取締役 CEO 福澤知浩、以下「SkyDrive」)は、HondaJet(ホンダジェット)や Bell(ベル)へリコプター等のビジネスジェットやヘリコプターのチャーター運航等を展開する株式会社 Japan Biz Aviation(本社:東京都大田区、代表取締役 小泉 愼・冨永 政幸、以下「JBZ」)と、日本国内における「空飛ぶクルマ」の商業運航に向けた業務提携に関する基本合意書を締結したことをお知らせいたします。