- 2023.6.26
ドローンの管理、制御、運用などに公開されている技術を集積するコミュニティー、DOP Project(ドッププロジェクト)が6月26日から始まるJapanDrone2023 で公開される。スマート農業の推進やオープンソースのオートパイロットシステム、ArduPilot(アルデュパイロット)を土台に開発するエンジニアを養成する事業を展開しているドローン・ジャパン株式会社(東京)が中心となって、賛同するメーカー、開発事業者などが構想を練ってきた。第一弾として、ドローンの機体管理や不具合の原因診断などを自動化するシステム、DOP SUITE(ドップスイート)シリーズを開発し、今年度下期をめどに提供を開始する。またJapanDrone に出展するDOP Projectパートナーはブースにロゴを掲げるなどして、コミュニティーの活性化を進める。
機体管理、不具合の原因診断などでオープンソース活用を提案 運用不安の解消に
DOP Project はDrone Open Platform Projectの略称で、オープンソースの活用を高度化する企業や団体が知見を持ち寄るコミュニティーで、ドローン・ジャパンのほか、デバイスメーカー、SIer、機体メーカーなどがパートナーとして参加している。ドローンの制御、管理などに必要なドローン本体のフライトコントローラー、フライトコード、フレーム、センサー、バッテリー、コンパニオンコンピュータなどの要素技術や、通信、アプリ、プロポ、クラウドなど制御、運用、管理などに不可欠な拡張機能、周辺機器の技術も網羅する。開発した技術はコミュニティー内で共有し、安定運用などプロダクトの付加価値向上に用いる。
第一弾として開発しているDOP SUITEは、機体管理や不具合診断をサポートするシステムだ。ドローンに不具合が生じたさいの原因特定に必要な機体の状況を自動で診断し、原因の特定を迅速化する。技術に不慣れなドローンユーザーが不具合に直面したさいの不安を軽減、解消することを目的に開発された。DOP SUITEを搭載したドローンを利用するユーザーは、技術に不慣れであっても機体の状況を的確にメーカーに伝えることが可能になるため、ユーザーの不安の軽減と利用の促進が期待できる。このほか、不具合を予知するアラートを発出する機能や、飛行記録を出力する機能も持たせる。
DOP Projectは、コミュニティーの拡大を進めることにしている。MAVLINKでのコミュニケーションプロトコルを採用していればコミュニティーに参加が可能だ。またDOP SUITEを今年度下期にローンチする計画で、その後もプロダクトの開発と、オープンソースの普及を図る。
JapanDroneでは「DOP Project」としてブースを設け、パートナーの概要や対応する技術、今後の展開などを説明することにしている。
AUTHER
 村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2021.5.11
ドローンのエンジニアを育成する事業を手掛けるドローン・ジャパン株式会社(東京)とソフトウェア開発のJapanDrones株式会社(長野県)は5月11日、ドローンなど自律移動機を独自に開発する事業者を対象に、開発支援と実証支援サービスを提供する新会社、アルデュエックス・ジャパン株式会社(東京)を合弁で設立すると発表した。発表当日に設立する。ドローンの動きを支えるソフトウェア、アルデュパイロット(ArduPilot)を使った独自開発の増加に伴い拡大している支援要請に答える。アルデュパイロットに精通したエンジニアチームが支援にあたり、アルデュパイロットのエンジニアとして世界的に知られるランディ・マッケイ氏が監修を担う。アルデュエックスの勝俣喜一朗社長(COO)は「日本で開発したドローンが世界に羽ばたくよう支援したい」と話している。
ArduPilot精通のエンジニアが担当 ランディ・マッケイ氏が監修
アルデュエックス・ジャパンは、ドローン・ジャパンとJapanDronesが50%ずつ出資する。ドローン・ジャパンの春原久徳会長が新会社CEO取締役会長に、JapanDronesのランディ・マッケイ社長がCTO取締役最高技術責任者に、ドローン・ジャパンの勝俣喜一朗代表取締役がCOO代表取締役社長にそれぞれ就任する。
提供するサービスは、自律移動機の動きを制御するためのソフトウェア、アルデュパイロットを活用した開発支援と実証支援に絞る。事業者のかわりに開発を請け負う代行サービスはしない。サービスの提供によって、事業者が開発を手掛けるドローンなどの機体が、事業者の思うような動を実現するように助言、提案、補助開発などを実施する。自律移動機は、高齢化や人手不足を背景に作業現場を中心に導入が広がっており、独自開発に乗り出す事業者が急増している。サービスはこうした事業者の要請に答える。
サービスでは最初に、アルデュパイロットの基礎を学ぶ勉強会を実施、事業者の要望、原稿、課題と対応法などを明確化するコンサルティングを実施、その後開発支援、実証支援を実施する。開発支援、実証支援にはアルデュパイロットに詳しく実績も豊富なエンジニアがあたる。サービス開始時点で7人のエンジニアでチームを編成する方針で、事業主の開発方針に応じて、その領域に強いエンジニアが担当する。全体についてランディ・マッケイCTOが監修する。
アルデュエックス・ジャパンが提供する開発支援、実証支援は以下の通り。
■自己位置推定
自律移動プロセスにとって始点となる自己位置推定(EKF:Extended Kalman Filter<拡張カルマンフィルタ>)の機体制御の適正化■衝突回避
各機体や環境、目的に応じた衝突回避の実装■非GPS環境での制御
各機体や環境、目的に応じたGPS・GNSSを利用しない機体制御の実装■陸上走行・水上航行の安定的なナビゲーション
陸上型・水上型自律型移動ロボットに特化した安定性や精度を高める機体制御■機体セキュリティ対策
乗っ取りなどの機体制御に関わる機体・送信機のセキュリティ実装■冗長化対策
フライトコントローラー・電波・電源などの冗長化実装■機体安定化のための機体チューニング支援
各機体の挙動安定のための各種パラメータの設定およびチューニング支援アルデュパイロットは、プログラムが公開されているオープンソースのソフトウェアで、誰でも無料で開発に参加できる。多くの開発者が参加しているため不具合の修正や刷新に素早く対応するほか、不適切な改変が行われないなどの特徴を持つ。機体に搭載されたGPS、加速度、気圧、ジャイロ、磁気方位、超音波など機体に搭載されたセンサーが測定した情報を受け取り、機体の動きを左右するモーターの回転数を自動で加減するフライトコントローラーなどに広く用いられる。柔軟性も特徴で、回転翼を備えたマルチコプター型のドローンのほか、固定翼機や航空機、地面を移動するローバー(UGV)、水の中を潜って移動する水中ドローンなど、自律移動型のロボットの制御として広く疲れている。
ドローン・ジャパンとJapanDronesは、2016年5月からこれまで5年間、ドローンエンジニアを育成する「ドローンエンジニア養成塾」を開催しており、これまでに350人を輩出している。
アルデュエックス・ジャパンの社長に就任する勝俣喜一朗氏は「日本国内での開発需要が高まるにつれて、フライトコントローラーなどソフトウェアについての相談を多く受けるようになっています。今回、そうした相談に開発と実証支援のサービスを提供することでこたえて参りたいと思っています。事業者の開発意欲を尊重し、支援をすることで日本のドローンや自律移動型ロボットが世界に羽ばたいていく手助けとなればいいと思っています」と話している。
アルデュエックス・ジャパンの春原久徳CEO、ランディ・マッケイCTO、勝俣喜一朗社長COO 
取材に応じアルデュエックス・ジャパン設立の意気込みを語る勝俣喜一朗社長 ランディ・マッケイCTOのインタビュー動画.。ドローンのソフトウフェアに詳しいジャーナリストの田中亘氏が、日本企業がArduPilot1を採用する利点や、ArduPilotの未来などについて、興味深いコメントを引き出している 
AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2020.10.13
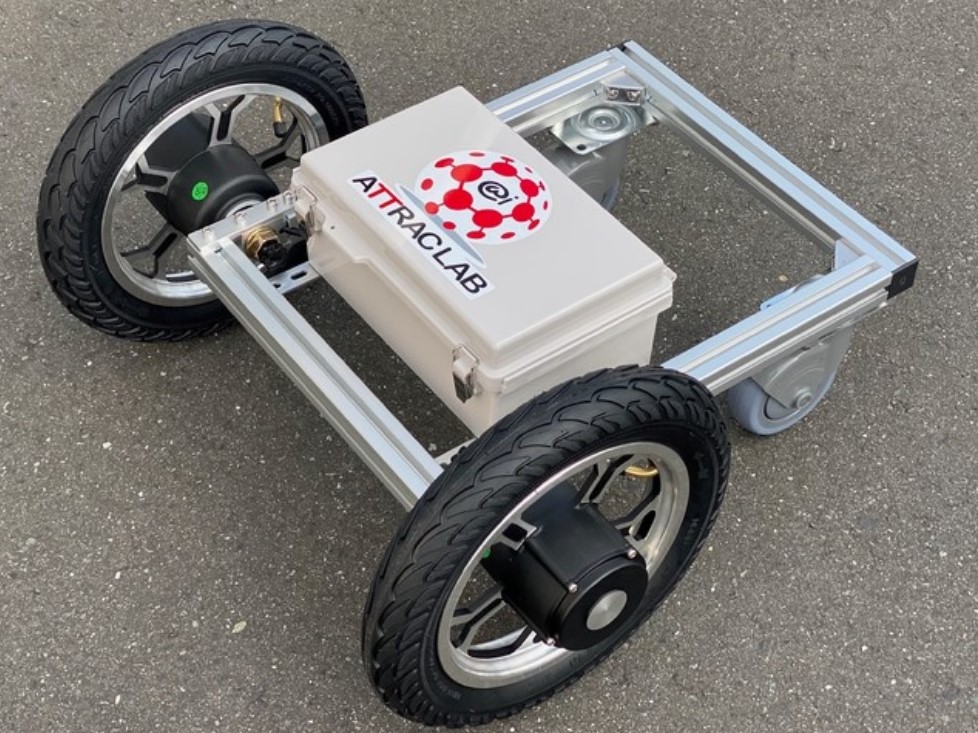
株式会社アトラックラボ(埼玉県三芳町)は10月12日、作業用無人車両(ローバー)の開発支援サービス、「AT-DRIVEスターター」を開始したと発表した。同社は国産ドローン開発の支援サービスを表明しているが、それに続く無人機開発支援サービスとなる。プラットフォームや制御ソフトなどでサポートする。
「自動運転」への課題に突き当たったときに、お手上げにさせない!
開発支援サービス「AT-DRIVEスターター」でのベース車両には、積載量の小さい小型車から100㎏を積載できる車両までを複数用意し、相談者の作業や用途に応じたローバーの開発を支援する。ドローン開発サービス支援同様、ArduPilot系のオープンソースを活用した開発支援で、「The Cube」を使うことを念頭においている。
アトラックラボの伊豆智幸氏は、「作業を便利にするために車両を開発しようと思い立っても、自動運転に突き当たったときに、行き詰まったりお手上げになったりすることが多いという話を聞きます。しかしそこで、(ArduPilotの)Pixhawkというものが分かり、ミッションプランナーが分かれば、おもしろがってつくれると思っています。趣味の延長の感覚で、実用機を手作りしたい人をサポートさせて頂きます」と話してる。
・株式会社アトラックラボ:TEL 049-293-6138 ・メールアドレス:sales@attraclab.com ・アトラックラボホームページ:http://attraclab.com
AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2020.10.13

ロボット開発支援を手掛ける株式会社アトラックラボ(埼玉県三芳町、伊豆智幸代表取締役)は、ドローンの国産化に必要な技術のサポートサービスを開始したと発表した。利用者が持つドローンに海外製フライトコントローラーが搭載されている場合に、それをオープンソースでカスタマイズすることなどを念頭に置いており、伊豆智幸代表は、「大掛かりな開発ではなく、使いやすくしたい人や、実用機を自作したい人の手助けをしたい」と説明している。
ArduPilot系「The Cube」活用し独自カスタマイズも 伊豆氏「使い方支援に近い」
アトラックが開始した想定している開発支援サービスは、ドローンの開発で敷居が高いとされるフライトコントローラーやコンパニオンコンピューターなどが中心になると想定している。サービスではArduPilot系で、採用実績も多い「The Cube」(Pixhawkオートパイロットの進化版)を使うことで、相談者の海外製ドローンなどのカスタマイズ需要や独自開発の相談に応じる。「The Cube」は、台湾と米国で生産されているが、オープンソースのため日本で独自ハードを製作したりカスタマイズしたりすることが可能だ。
支援には、フライトコントローラーの使用方法の伝授、コントロールソフトウエアのカスタマイズ、AI処理を行うコンパニオンコンピューターの接続、開発支援を含む。ほかにもフレームの設計支援、カーボンやアルミ部品の製造支援、モーターやESC(モータードライバー)の選定、調達など、ドローンを組み上げるのに必要な支援も行う。
また、アトラックラボで設計・製造した、汎用フレームの部品供給も行っており、様々なアプリケーションに対応する独自ドローンが作れる。
今後は、各地のパートナーと、運用やトレーニングを企画し、国産ドローンの開発・運用を支援する方針という。
伊豆代表は「使いたい、使いやすいドローンにする、作る、という意味では、“開発支援”ではありますが、“使い方支援”に近いかもしれません。フライトコントローラーは、オープンソースでカスタマイズしようとしても、パラメータが多く、何から始めたらいいのかがわかあらないという声を多く聞きます。実際、オープンソースには日本語の説明もなく、日本人にはわかりにくい面はありますのでそんなところもサポートしたい」と話している。
想定しているのは大掛かりな開発よりも「ゆるく作りたい人のサポート」という。「たとえば農業従事者であれば、散布のためのドローンを自分でつくりたいとか、粒剤をまくためのアタッチメントを取り付けたい、といったケースなどを考えています」(伊豆代表)。
さらに、「ロボット、という話題になると、他人ごとになってしまう傾向が多いのではないかと思っています。大企業や大資本でないとできないこともありますが、実はそればかりではないし、それほど手をかけなくてもできることがあります。マニュアルで飛ばすとか、簡単なミッションで飛ばすといったことなら大掛かりなことではなく、身近でできる。そんな成功体験を味わってほしいとも思っています」と話している。
アトラックラボのメールアドレス:sales@attraclab.com
アトラックラボのホームページ:http://attraclab.com
「The Cube」(左)などを活用することを念頭に置いて開発支援サービスをはじめたアトラックラボの伊豆智幸代代表取締役(右下) AUTHER
村山 繁DroneTribune代表兼編集長。2016年8月に産経新聞社が運営するDroneTimesの副編集長を務め、取材、執筆、編集のほか、イベントの企画、講演、司会、オーガナイザーなどを手掛ける。産経新聞がDroneTimesを休止した2019年4月末の翌日である2019年5月1日(「令和」の初日)にドローン専門の新たな情報配信サイトDroneTribuneを創刊し代表兼編集長に就任した。現在、媒体運営、取材、執筆、編集を手掛けながら、企画提案、活字コミュニケーションコンサルティングなども請け負う。慶應義塾大学SFC研究所ドローン社会共創コンソーシアム研究所員、あおもりドローン利活用推進会議顧問など兼務。元産経新聞社副編集長。青森県弘前市生まれ、埼玉県育ち。 -
- 2020.8.11
オープンソースのフライトコントローラーで日本のドローン産業を支える人材を育成しているドローンエンジニア養成塾。発表会レポートの最終回は、前回の6組に続き、塾長を務めるJapanDrones株式会社(長野県)のRandy Mackay代表のプレゼンテーションを含めた5組の発表とデモフライトを紹介する。(田中亘)
■捜索・点検用 親子ドローン
前回の②までに6組の発表をお伝えした。
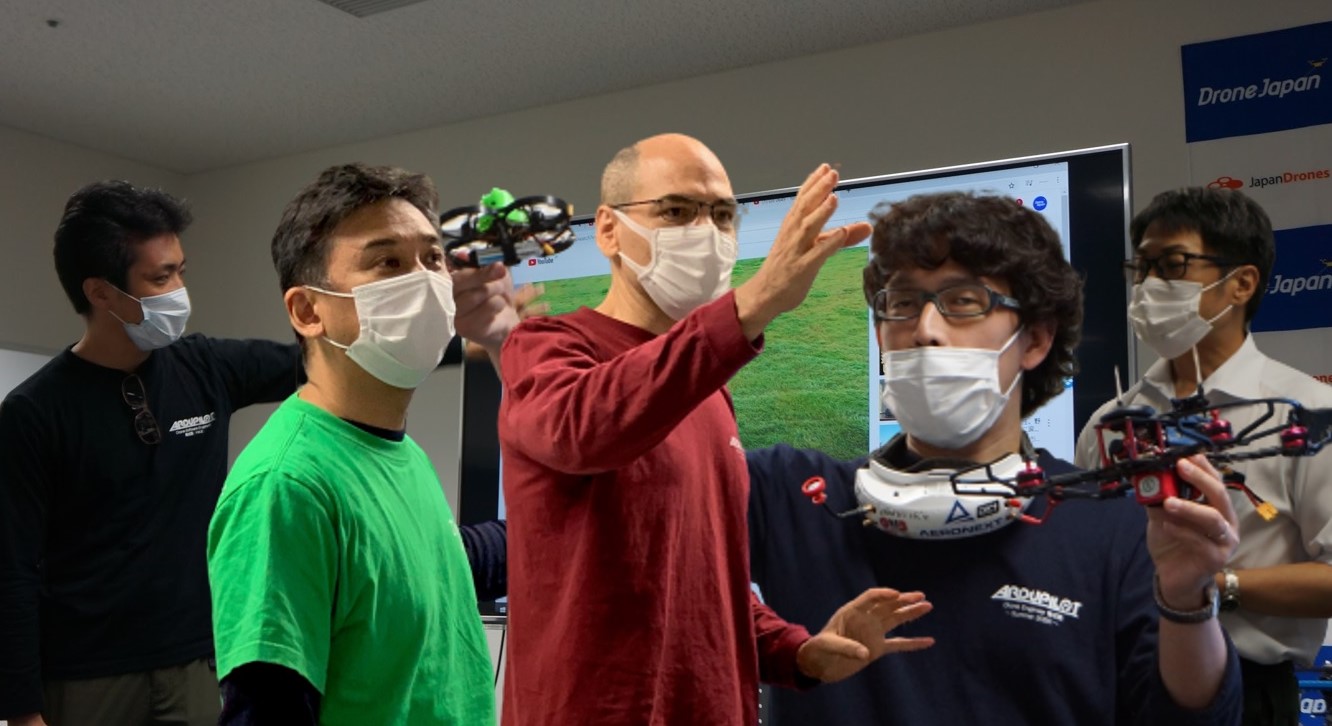
続く7組目の藤川秀行氏による「捜索・点検用 親子ドローン」は、2台のドローンを組み合わせた探索への取り組みだ。
飛行中の5インチArduCopter(親機)からFPVマイクロドローン(子機)が飛び出し、被災家屋やプラント内部などの狭所を飛行する。2台を連携させることで、小型ドローンのバッテリーを節約し飛行エリアを拡大する。
藤川氏は「高所、低所、被災地など、人が近づけない場所からの飛行を可能にする」と説明する。開発における今後の課題としては、親機から飛び立った子機の回収、子機から伝送される映像の高画質化、中継機器の搭載、子機のオートパイロットなどがある。
親子ドローンが切り離されて飛ぶ仕組みを解説する藤川秀行さん 屋外でのデモンストレーションでは、親機のパラメータ設定のトラブルなどで、残念ながら子機が離陸する様子は確認できなかったが、YouTubeには成功した動画が収められている。
■ArduPlaneによるVTOL機製作
8組目の松本威氏は、市販機での「ArduPlaneによるVTOL機製作」について発表した。
松本氏の製作したVTOL機は、市販機を改造したもの。狭い場所での離着陸と長距離飛行を両立させるVTOL機は、北海道で開催されている遭難者を探索するコンテストでの優勝を狙っている。松本氏は「市販のWingcopterのようなVTOL機は、約1千万円します。しかし、このArduPlaneによるVTOL機では、10万円で製作できます」とメリットを訴える。
デモ飛行の動画を紹介する松本威さん 直前のテスト飛行のさいにモーターが破損して煙を吹いてしまったことから、デモフライトは中止されたが、コスト面での利点は参加者に強烈な印象を残した。

開発中のVTOL機 ■OpenCVによる自動追尾オムニローバー
9組目の山田義久氏は「OpenCVによる自動追尾オムニローバー」を発表した。
同ローバーは、前後の駆動輪をギヤボックスで連動し、右側または左側のモータを制御することで、オムニローバーのような動きを実現する。
4つのタイヤで移動するローバーでは、主に2つの制御方法がある。ひとつは、後輪に駆動用のモーターを、前輪にステアリング用のモーターを取り付けて、ラジコンカーのように前後に移動中にステアリングを操作して左右に方向を変える方法。もうひとつは、左右のタイヤに独立したモーターを取り付けて、移動と回転を同時に行うスキッドステアリングという技術。キャタピラで移動する重機などが、スキッドステアリングに近い。
山田氏はモーターコントローラのポート数の関係から、2つのモーターで4輪ローバーを制御するために、前後の車輪を連動させた。
オミニローバーの仕組みや搭載b品について解説する山田義久さん MissionPlannerでプログラムされたコースを自動走行する計画をたてていたが、当日の会場では人工芝の摩擦抵抗が大きすぎて、オムニローバーは思うように前進できなかった。そこで、山田氏は、本体を手に持って、スキッドステアリングの動きに合わせて走り回り、コーナーでタイヤの回転が変化する様子を体現してみせた。

ローバーを手に持って走る山田義久さん。体を張って動きを再現した ■ドローンキットプログラムによる「同時自動・陸海空ドローン」
10組目の我田友史氏は、「ドローンキットプログラムによる『同時自動・陸海空ドローン』を紹介した。
我田氏は、マルチコプターとローバーをドローンキットプログラムにより、2台同時に制御するデモンストレーションを開発した。開発には、Pythonというスクリプト言語を利用し、2つのタイプが異なるドローンを同じコマンドで制御できるようにした。
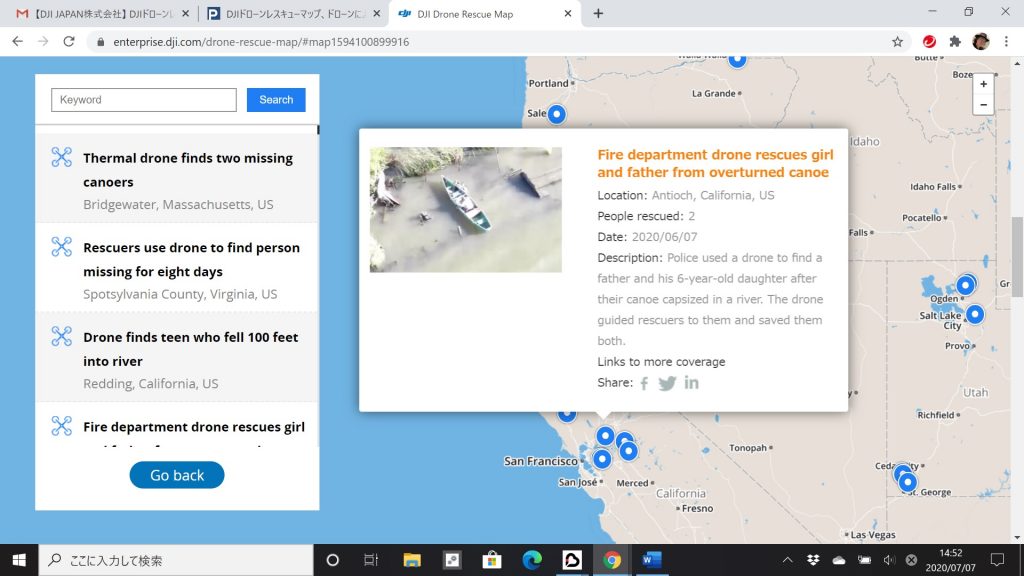
2台のドローンを同時に制御できるメリットとして我田氏は「例えば、捜索などを想定したときに、ドローンで上空から海の遭難者を発見し、その位置情報を元に水上ドローンが救助に向かうという複合案が考えられます」と話す。その他にも、マルチコプターと水上ドローンとローバーを組み合わせて、テトラポットや堤防などの入り組んだ地形を複合的に捜索するアイディアも紹介された。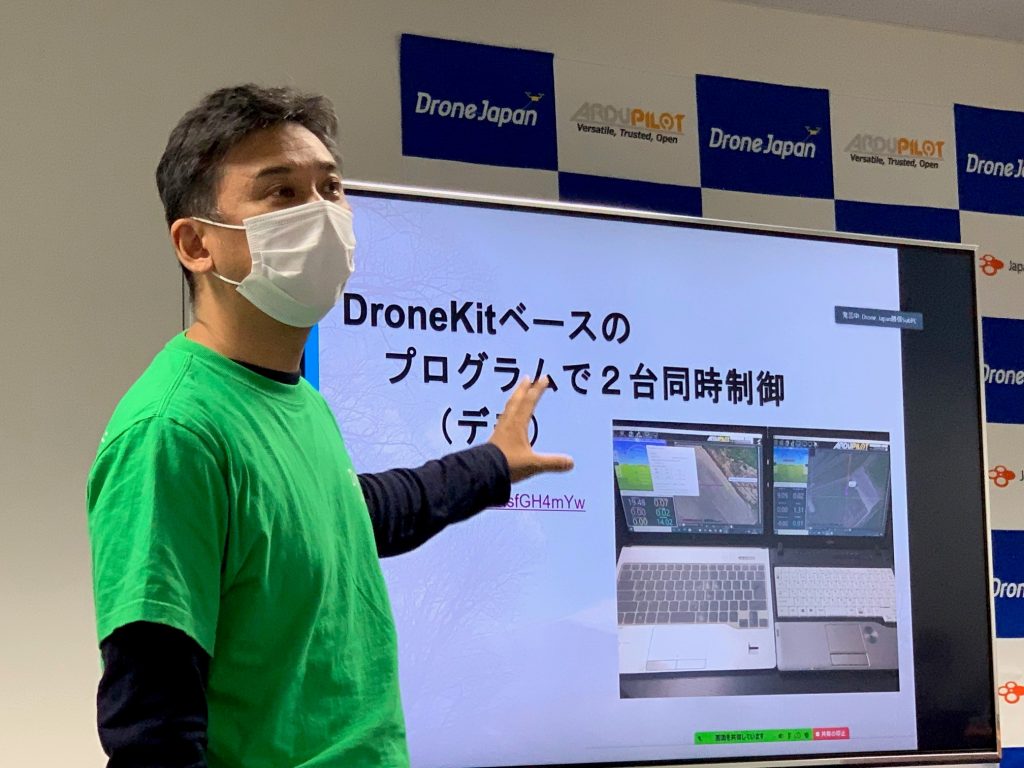
陸海空の活用例を説明する我田友史さん デモンストレーションでは、最初にマルチコプターがオートパイロットで飛行して、着陸した位置のデータが送信されると、その位置を目指してローバーが自動制御で走る予定だった。しかし、用意していたローバーにトラブルが発生し、動かないという物理的な問題に突き当たった。
そこで、4組目に登壇した高山氏の「ArduRover 無人自動散水車両」がピンチヒッターとして登場。同じ制御システムでオートパイロットが可能「な「ArduRover 無人自動散水車両」は、期待に応えて代打の役割を果たし、マルチコプターが着陸した地点に正確に移動してみせた。
トラブルの発生したローバーにかわり、高山誠一さんのArduRover無人自動散水車が緊急登板 
マルチコプターの着陸場所まで自動走行。見事な連携プレーを披露した ■デモンストレーションの大トリは塾長のローバーとマルチコプター
発表会の最後は、Randy Mackay塾長による2つのデモンストレーションが紹介された。ひとつめは、ローバーによる衝突回避システム。ローバーの前方に取り付けたカメラの映像をリアルタイムに解析して、障害物を検知してプログラムされたルートを自動で回避する。
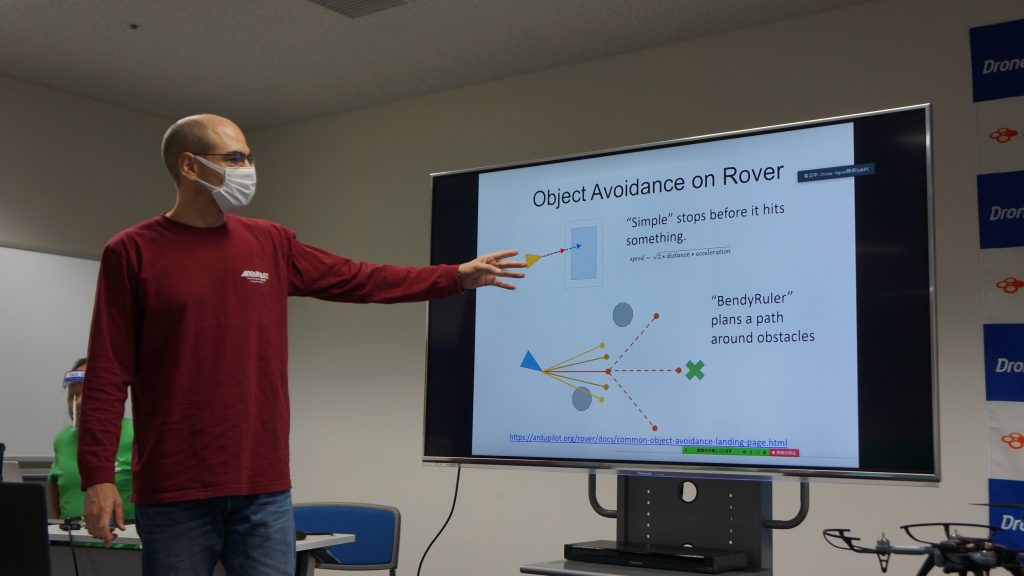

障害物を検知するカメラが取り付けられたローバー デモンストレーションの会場では、次々と前方に立ちはだかる人物を検知して、停止か回避の行動をとっていた。

障害物を検知して停止するローバー 
たちはだかる障害物(笑) もうひとつのデモンストレーションは、T265センサーを使って、非GPS環境下で周辺の障害物などを認識しながら飛行することを想定した。塾長はT265が屋内環境で物質のエッジなどを捉えて認識するため、光量が強く目立った構造物のない屋外では、正確に周囲を認識できない恐れがあると分析。屋外で検証したところ、事前の分析通り、マルチコプターは安定した飛行を示さなかった。
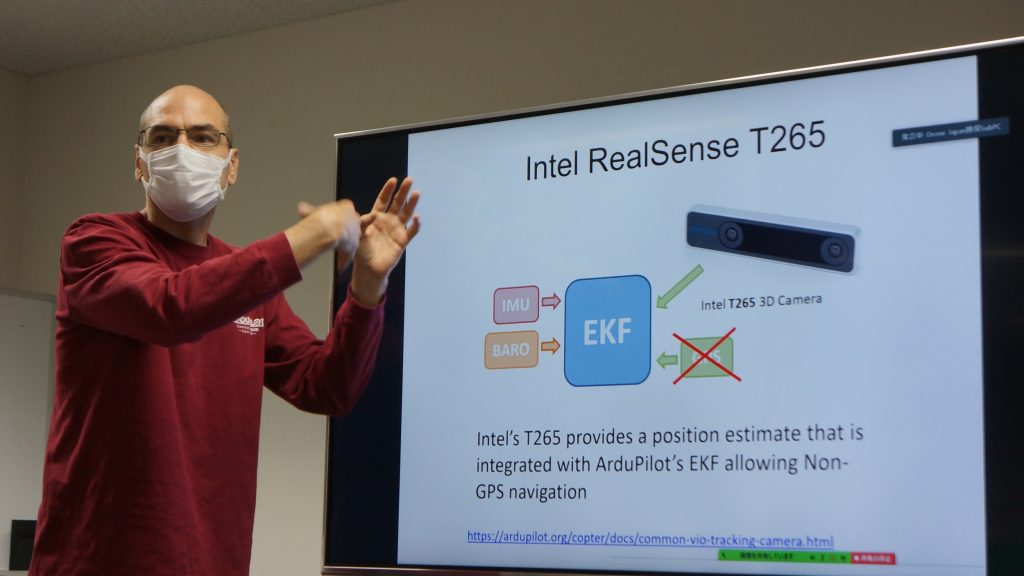
3Dセンサーで非GPS環境下での飛行を制御する仕組み説明するRandy Mackay塾長 
3Dセンサーを搭載したドローン デモンストレーションは仮説通りの動作を示したものや、仮設通りには動作しない要因を発見する機会になったものなど、多くの成果をあげた。塾長と塾生は、今後も日本のドローン産業や技術を盛り上げていくために、新たな研究や開発に取り組んでいく。

日本で実力をつけてきた「ドローンエンジニア養成塾成果発表」レポート①
日本で実力をつける「ドローンエンジニア養成塾成果発表」レポート②
日本で実力をつけていく「ドローンエンジニア養成塾成果発表」レポート③AUTHER
 田中 亘
田中 亘 -
- 2020.7.29

軽井沢で開催された「ドローンエンジニア養成塾」の成果発表会&デモイベントの様子を、前回に続いてお届けする。発表会には1期から9期までの卒業生から選ばれた10組と、塾長のJapanDrones株式会社(本社:長野県)のRandy Mackay代表を合わせた11組が成果を披露した。各組は午前に屋内会場で発表を行い、午後に屋外でデモフライトに臨んだ。本稿では前半6組の発表内容とデモフライトを紹介する。(田中亘)
■ArduPlane&Boatによる海洋ゴミ回収プロジェクト

発表に臨む扇拓矢さん 1組目の扇拓矢氏による発表は、「ArduPlane&Boatによる海洋ゴミ回収プロジェクト」。手作りの水上ドローンを使い、池や堀などに投棄された水面のゴミを回収する取り組みだ。
水上ドローンは、2つのスクリューで走行する。船体の方向転換は、左右スクリューの推力差(Skid Steering)で実現する。会場ではボディボードを切断して浮力にした本体が展示された。今回は、会場での水上ドローンのデモンストレーションは行われなかったが、発表会では実験の様子を動画で紹介した。
扇氏は、JAXAのイノベーションプロジェクトに応募したことを報告。「計画は、プレーンで上空から海上のゴミの場所を検索し、そのマップ情報をもとに、船やローバーで回収にかけつける、という内容です。採択されたらみなさん手伝ってください」と塾生に呼びかけていた。
■世界初の
Web版MissionPlanner!
タブレットを手にプレゼンテーションをする川村剛さん 続く川村剛氏は、「世界初Web版MissionPlannerを開発! &T265での愉しみ方!?」を発表した。
MissionPlannerは、ArduPilotで飛行するドローンなどをPCで制御するアプリケーション。川村氏は、そのアプリケーションをWeb版に移植した。Web版のMissionPlannerは、通信回線さえあればタブレットで利用できるメリットがある。
用意されている機能は、自動航行のミッションアイテムの一覧、通常のマップ上にオリジナルマップの重ね合わせ、機体のパラメータ確認などだ。また、ログの一覧を確認したり、任意のログをダウンロードしたりすることもできる。さらに、Intel RealSenseのトラッキングカメラT265ストリーミングに対応し、ドローンに搭載したカメラからの映像を単独の画面で確認できる。川村氏は、「今後はストリーミングと障害物検知の組み合わせに挑戦したいと考えています」と話す。
養成塾の調べでは、Web版のMissionPlannerは世界初という。
Web版Missionplannerのデモ動画 ■DiscoのArduPilot化!
毎回ユニークな機体に挑戦する小宮光裕さん 3組目に登壇した小宮光裕氏は、「パロット社DiscoのArduPilot化」を発表した。
1期卒業の小宮氏は、過去にもDJI製ドローンのフライトコントローラーをArduPilot化するなど、既製品の高性能化や、オリジナルVTOL機の作成にも取り組んできた。
今回のパロット社Discoは、デルタ翼のドローンで、7万円前後で購入できるホビー機。45分の連続飛行が可能で、機体の前方に装備されているカメラの映像をゴーグルで見ながら、鳥のような飛行体験が得られる。しかし、パロット社の提供しているフライトコントローラーは、コントローラーでの操作を基本にしたもので、飛行の自由度は低い。そこで、小宮氏はArduPilotのファームで運用できるように改造し、自由度の高い飛行制御を可能にした。
小宮氏によれば「自由度の低いフライトコントロールをAruduPilotにすることで、様々な機能を実行できるようになる」という。実は、パロット社では、自動航行などの高性能な飛行性能を備えたeBeeという産業向けのデルタ翼ドローンも販売している。eBeeの価格は、RTKモデルで約400万円。Discoとの価格差は大きい。小宮氏は「7万円のDiscoで、400万円のeBeeと同じ運用ができたらいいな」と考えて、ArduPilot化に取り組んだ。
午後のデモンストレーションでは、ArduPilot化されたDiscoのデモフライトが行われた。小宮氏の手から飛び立ったDiscoは、プログラムされた周回軌道を自動航行で飛行した。会場の広さに制約があったため着陸は小宮氏がコントローラーで行った。
参加者は、Discoの自動航行に感心するだけではなく、ドローンパイロットとしても超一流の小宮氏の操縦テクニックにも魅了されていた。
(ArduPilot化さ

Ardu化されたDiscoを離陸シーン。小宮さんの操縦技術の高さも参加者を魅了した 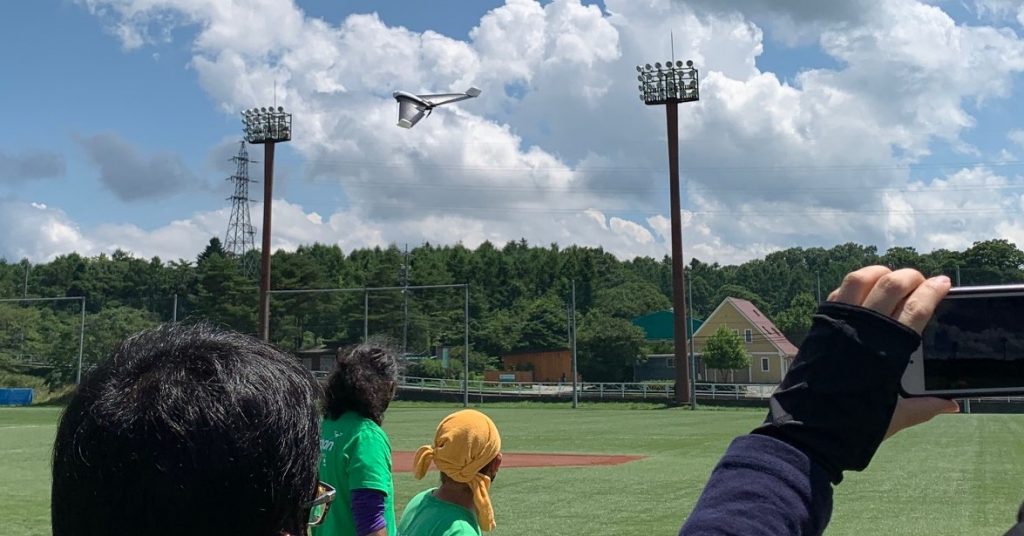
会場の上空を舞うDisco ■ArduRover 無人自動散水車両

ArdyRover無人散水車を発表した高山誠一さん 4組目の高山誠一氏は、「ArduRover 無人自動散水車両」を発表した。
市販のトラック型ラジコンを改造し、荷台の上に水を入れたタッパーウェアを置いて、USB電源で動くモーターを組み合わせた給水システムを配管。走行時に穴を開けたビニール管から水が滴り落ちる構造だ。高山氏は「ベースはタミヤの1/24 RCヘビーダンプというラジコンカー。そこにPixhawk miniを搭載しました」と説明した。
開発において高山氏は「なかなか真っ直ぐに進まないので苦労しました。将来的には、広い面積を自動で散水できるようなローバーを設計したいので、みなさんに見てもらい、フィードバックをもらえたら」と話した。
デモンストレーションでは、会場の人工芝がArduRoverのタイヤにとって抵抗が大きく、思うように進まない場面もあった。それでもあらかじめプログラムされた経路を自動で散水する動きが確かめられ、今後の可能性の大きさを証明した。

■ドローン用自動充電装置
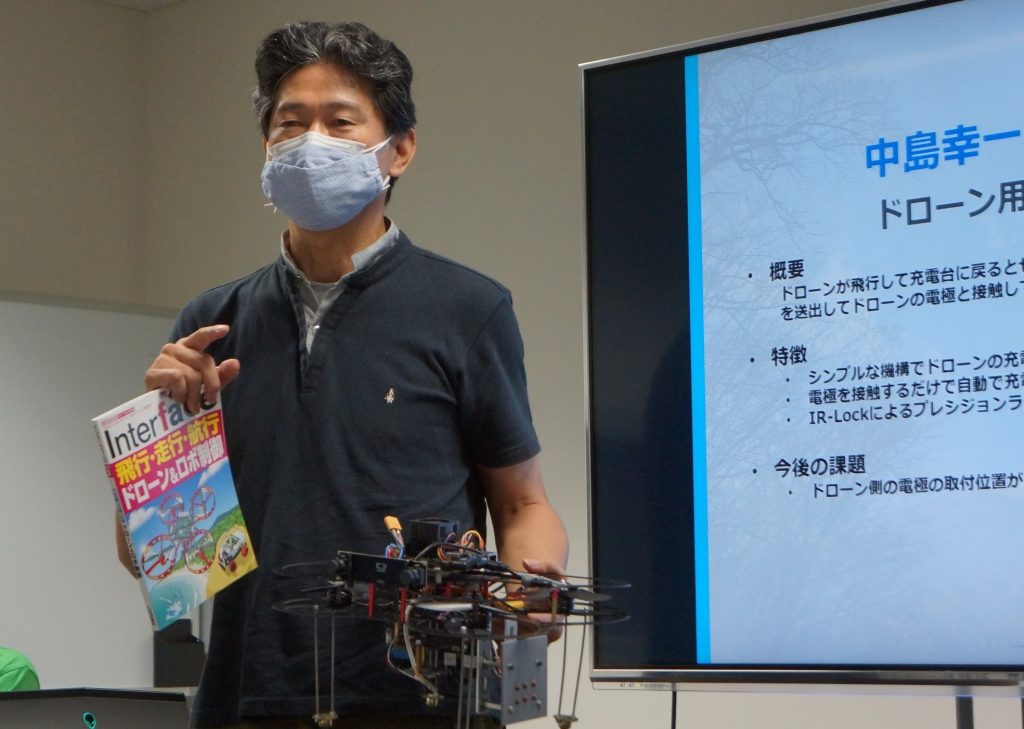
自動充電ドローンを手に説明する中島幸一さん 中島幸一氏は「ドローン用自動充電装置」を発表した。ドローンを自動で充電する給電ステーションで、ドローンが着陸すると、センサーが感知して自動でドローン側に設けた電極に充電器を接続させる仕組みだ。
充電装置はすり鉢状の構造になっていて、IR-Lockによりドローンは正しい向きで着陸する。ドローンには専用の脚が取り付けられていて、着陸するとすり鉢の溝と脚が連動して、正確な位置に滑り落ちて固定される。着陸を感知すると、充電用の電極を備えた装置が開いて、ドローン側の電極に接続される。一連の動作は自動化されているので、ドローンの充電ポートとしての利用が期待できる。一方で中島氏は「ドローン側に電極を取り付ける位置が限定される点が課題」と説明した。
(すり鉢状の給電ステーションは左側の電極がドローンの着陸後に自動で開いて充電する)

持参したすり鉢状の給電ステーションを見せながら説明する中島さん(左) 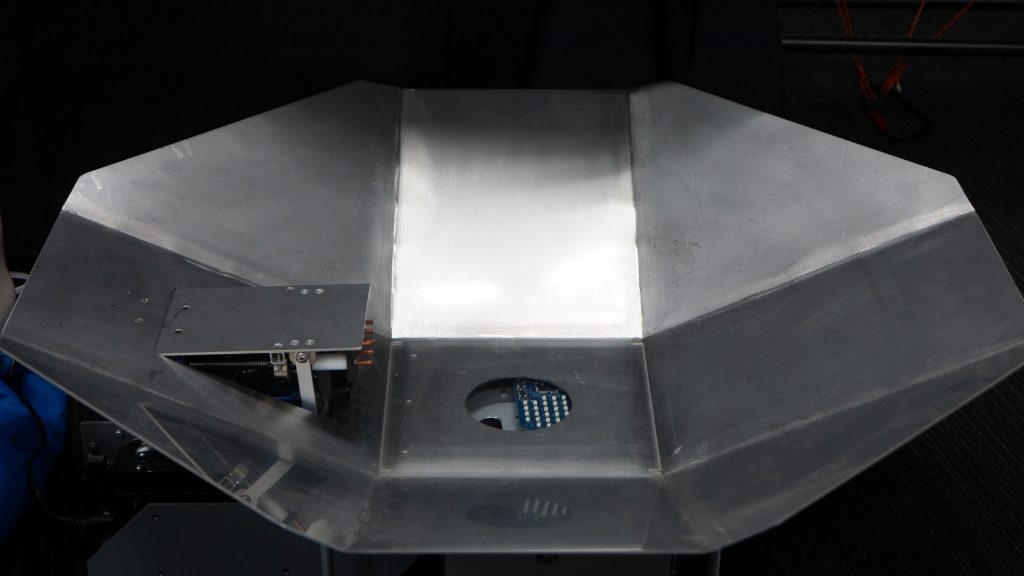
給電ステーションは向かって左側にある電極がドローンの着陸後に自動で開き充電を開始する ■緊急物資搬送用ドローン

輸送用ドローンについて説明する野口克也さん 6組目の野口克也氏は、「離島物資輸送、緊急物資搬送用ドローン」を紹介した。
野口氏は農薬散布用の大型ドローンを改修して、Ardupilotで運用できる物資輸送のプラットフォームドローンを開発した。その特徴は、自動で貨物を切り離せる構造を備えた長吊りシステムで、目的地への物資輸送を可能にする。切り離し装置は、機械式になっていて、フックに吊り下げられた荷物が地面に降ろされて負荷がなくなると、自動で開いて紐などをリリースする。
フライトコントローラーには、ADS-B搭載のPixhawk2.1 Cube Orangeを搭載し、オートパイロットも目指している。デモフライトは行われなかったが、会場では機体を披露しながら機能と活用場面などについて説明した。
次回は残る5組の発表内容を紹介する(続く)

機体を説明する野口さん 
発表に臨んだ参加者の記念撮影 AUTHER
田中 亘 -